技术特征:
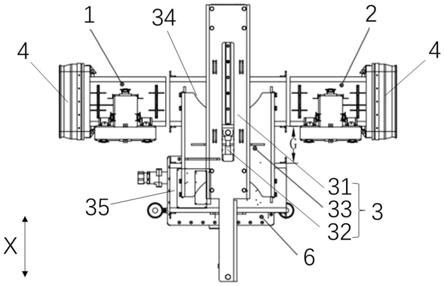
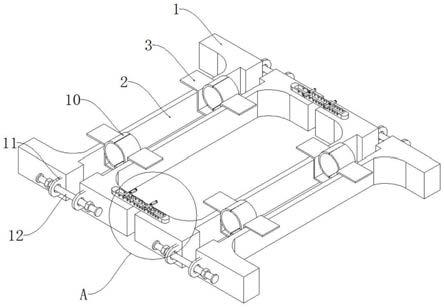
1.一种巡检机器人轨道单元,其特征在于,包括:第一渡口轨道、第二渡口轨道以及设置于所述第一渡口轨道和所述第二渡口轨道之间的吊厢机构;所述第一渡口轨道和所述第二渡口轨道的一端设置有封闭对接机构,用于与对应端的相邻轨节连接;所述吊厢机构包括一吊装支架、一推拉机构、与所述吊装支架连接的一支撑机构以及并排设置于所述支撑机构上的主轨道和备用轨道;所述推拉机构驱动所述支撑机构沿垂直于所述主轨道和备用轨道的水平方向移动,以使所述主轨道的两端分别与所述第一渡口轨道和所述第二渡口轨道对接,或使所述备用轨道的两端分别与所述第一渡口轨道和所述第二渡口轨道对接。2.根据权利要求1所述的巡检机器人轨道单元,其特征在于,所述主轨道和所述备用轨道的长度以及所述主轨道和所述备用轨道之间的距离可根据巡检机器人的尺寸调节。3.根据权利要求1所述的巡检机器人轨道单元,其特征在于,所述吊装支架包括一滑轨以及设置于所述滑轨上且可沿所述滑轨移动的滑块;所述支撑机构与所述滑块刚性连接。4.根据权利要求1所述的巡检机器人轨道单元,其特征在于,所述推拉机构包括:一推拉支座,固定设置于所述支撑机构上;一液压缸,与所述推拉支座连接;所述液压缸的推拉杆进行伸出或回缩动作,通过所述推拉支座同步带动所述支撑机构沿垂直于所述主轨道和备用轨道的水平方向移动。5.根据权利要求4所述的巡检机器人轨道单元,其特征在于,所述推拉支座与所述支撑机构的固定方式为焊接。6.根据权利要求1至5中任一项所述的巡检机器人轨道单元,其特征在于,还包括:一通讯模块,用于接收一控制信号并传输至所述推拉机构;所述推拉机构在所述控制信号的作用下驱动所述支撑机构沿垂直于所述主轨道和备用轨道的水平方向往复移动。7.一种轨道子系统,其特征在于,包括多个轨节以及至少一个如权利要求1至6中任一项所述的巡检机器人轨道单元,所述巡检机器人轨道单元设置于任意相邻轨节之间。8.一种巡检机器人轨道系统,其特征在于,包括:远程控制子系统、权利要求7所述的轨道子系统以及设置于所述轨道子系统上的多个巡检机器人;所述巡检机器人可与所述远程控制子系统进行数据交互,以使所述远程控制子系统生成控制信号;所述远程控制子系统向所述巡检机器人轨道单元发送控制信号,以使所述巡检机器人轨道单元的所述推拉机构驱动所述支撑机构在所述吊装支架上沿垂直于所述主轨道和备用轨道的水平方向移动,以使所述主轨道的两端分别与所述第一渡口轨道和所述第二渡口轨道对接,或使所述备用轨道的两端分别与所述第一渡口轨道和所述第二渡口轨道对接。9.根据权利要求8所述的巡检机器人轨道系统,其特征在于:无需避让时,所述主轨道的两端分别与所述第一渡口轨道和所述第二渡口轨道对接;临时避让时,所述备用轨道的两端分别与所述第一渡口轨道和所述第二渡口轨道对接。
10.一种巡检方法,其特征在于,应用于权利要求8至9中任一项所述的巡检机器人轨道系统,包括:主动避让的巡检机器人停靠至距离最近的所述主轨道上,并向远程控制子系统发送避让请求,所述避让请求包括所述距离最近的主轨道对应的吊厢机构信息;远程控制子系统根据所述避让请求生成第一控制信号,并发送至所述距离最近的主轨道对应的吊厢机构;所述距离最近的主轨道对应的吊厢机构根据所述第一控制信号动作,以使其备用轨道的两端分别与所述第一渡口轨道和所述第二渡口轨道对接,进而使被避让的巡检机器人从所述备用轨道通过。11.根据权利要求10所述的巡检方法,其特征在于,还包括:被避让的巡检机器人从所述备用轨道通过,并向远程控制子系统发送避让完成信号,所述避让完成信号包括被避让的巡检机器人信息及其通过的巡检机器人轨道单元信息;远程控制子系统根据所述避让完成信号生成第二控制信号,并发送至所述避让完成信号中的巡检机器人轨道单元;所述避让完成信号中的巡检机器人轨道单元根据所述第二控制信号动作,以使其主轨道的两端分别与所述第一渡口轨道和所述第二渡口轨道对接。
技术总结
本发明提供一种巡检机器人轨道单元、轨道系统及巡检方法。该巡检机器人轨道单元包括:第一渡口轨道、第二渡口轨道以及设置于所述第一渡口轨道和所述第二渡口轨道之间的吊厢机构;第一渡口轨道和第二渡口轨道的一端设置有封闭对接机构,用于与对应端的相邻轨节连接;吊厢机构包括一吊装支架、一推拉机构、与吊装支架连接的一支撑机构以及并排设置于支撑机构上的主轨道和备用轨道;推拉机构驱动支撑机构沿垂直于主轨道和备用轨道的水平方向移动,以使主轨道的两端或备用轨道的两端分别与第一渡口轨道和第二渡口轨道对接。本申请可使需要交错通行的两个机器人通过吊厢机构的调度完成横向避让以及交错通行,提升多机器人分区段执行任务时的效率。段执行任务时的效率。段执行任务时的效率。
技术研发人员:朱超 庄智超
受保护的技术使用者:西安华创马科智能控制系统有限公司
技术研发日:2022.02.15
技术公布日:2022/4/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。