技术特征:
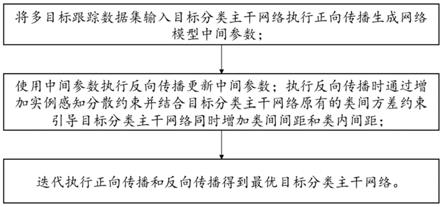
1.一种实例感知主干网络训练方法,应用于多目标视频跟踪,其特征在于,包括网络模型预训练,具体为:将多目标跟踪数据集输入目标分类主干网络执行正向传播生成网络模型中间参数;使用中间参数执行反向传播更新中间参数;执行反向传播时通过增加实例感知分散约束并结合目标分类主干网络原有的类间方差约束引导目标分类主干网络同时增加类间间距和类内间距;迭代执行正向传播和反向传播得到最优目标分类主干网络。2.如权利要求1所述实例感知主干网络训练方法,其特征在于,所述实例感知分散约束为类内方差约束,所述类内方差约束用于引导目标分类主干网络对于同类目标输出具有较大方差的分类向量,以增加同类目标的类内间距。3.如权利要求2所述实例感知主干网络训练方法,其特征在于,所述类内方差约束与类内距离和正则化项共同构建类内损失函数。4.如权利要求1所述实例感知主干网络训练方法,其特征在于,所述多目标跟踪数据集为otb-2015、lasot或uav123。5.如权利要求1所述实例感知主干网络训练方法,其特征在于,所述目标分类主干网络为alexnet、vgg19或resnet50。6.如权利要求1所述实例感知主干网络训练方法,其特征在于,所述实例感知主干网络训练方法采用t-sne算法降维。7.如权利要求1所述实例感知主干网络训练方法,其特征在于,所述实例感知主干网络训练方法还包括模型微调再训练,具体为:对实际场景的目标跟踪视频进行目标标定后再对经过网络模型预训练的目标分类主干网络再次训练,从而对模型参数进行调优以使目标分类主干网络适应实际场景的目标跟踪。
技术总结
本发明涉及一种实例感知主干网络训练方法,应用于多目标视觉跟踪,包括网络模型预训练和模型微调再训练,其中网络模型预训练具体为:将多目标跟踪数据集输入目标分类主干网络执行正向传播生成网络模型中间参数;使用中间参数执行反向传播更新中间参数;执行反向传播时通过增加实例感知分散约束并结合目标分类主干网络原有的类间方差约束引导目标分类主干网络同时增加类间间距和类内间距;迭代执行正向传播和反向传播得到最优目标分类主干网络。通过本发明提供的技术方案,能实现实例类间间距和类内间距同时增加,提高了多目标视觉跟踪的成功率和精度,同时不改变原始主干网络的网络结构、训练数据和超参数,使用极为便利。使用极为便利。使用极为便利。
技术研发人员:黄姗姗 马龙 吴海波 杨静 彭扬帆 徐玉 赵佳尧 杜江斌 魏邹建
受保护的技术使用者:西安工业大学
技术研发日:2021.12.31
技术公布日:2022/4/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。