技术特征:
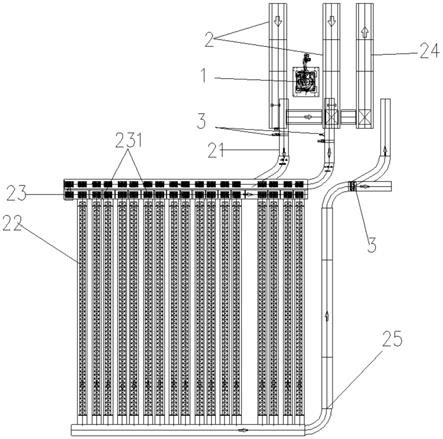
1.一种立体存储系统,其特征在于,包括拆垛机器人(1)和物料输送线(2);所述拆垛机器人(1)用于将堆垛的物料拆垛后放在所述物料输送线(2)的入口端;所述物料输送线(2)包括:摆转分线(21)和n层存储分线(22);所述n层存储分线(22)相互平行且沿竖直方向排布;所述摆转分线(21)包括竖直摆转板(211),所述竖直摆转板(211)能够在竖直方向摆转,且在摆转后与所述n层存储分线中的任一层存储分线(22)对接,所述n为大于一的整数。2.根据权利要求1所述的立体存储系统,其特征在于,一层所述存储分线(22)设置有m条,所述m条存储分线(22)水平排布,所述m为大于一的整数;所述物料输送线(2)还包括:n条缓存分线(23);一条所述缓存分线(23)上设置有m-1个传输节点,所述m-1个传输节点分别对接一层所述存储分线(22)中第2至m条存储分线;所述n条缓存分线(23)相互平行且沿竖直方向排布,所述缓存分线(23)的传输方向垂直于所述存储分线(22)的传输方向。3.根据权利要求2所述的立体存储系统,其特征在于,所述摆转分线(21)还包括旋转底座,所述旋转底座能够带动所述摆转分线在水平方向转动至所述缓存分线的接口处。4.根据权利要求1所述的立体存储系统,其特征在于,所述物料输送线(2)具有l组,所述l为大于等于一的整数,一组所述的物料输送线(2)包括一条摆转分线(21)和一列n层存储分线(22)。5.根据权利要求1所述的立体存储系统,其特征在于,所述n层存储分线(22)与所述摆转分线(21)的n个衔接点,沿所述竖直摆转板(211)的摆转轨迹分布。6.根据权利要求1所述的立体存储系统,其特征在于,所述物料输送线还包括n条出库分线(25);所述n条出库分线(25)相互平行且沿竖直方向排布,所述出库分线(25)的传输方向垂直于所述存储分线(22)的传输方向;一条所述出库分线(25)与一层所述存储分线(22)对接,用于将存储在所述n层存储分线(22)上的物料输送出库。7.根据权利要求2所述的立体存储系统,其特征在于,所述缓存分线(23)还包括摆轮分拣机(231);所述摆轮分拣机(231)设置在所述缓存分线(23)的传输节点上,用于将不同类型的物料分流到相应的一条所述存储分线(22)上。8.一种立体存储系统控制方法,其特征在于,包括:通过扫描机(3)和控制中心以及如权利要求1-7所述的立体存储系统,执行包括以下步骤:s1、拆垛机器人对堆垛的物料进行拆垛后放置在物料输送线的入口处;s2、物料经过扫描机,扫描机获取物料的相关信息发送至控制中心;s3、控制中心根据物料的信息分配存储分线,根据存储分线的层级,控制摆转输送线进行摆转,将物料分流到相应的存储分线上;s4、控制中心收到物料出库指令,控制多条存储分线和出库分线运动,将物料运送出
库。9.根据权利要求8所述的一种立体存储系统控制方法,其特征在于,所述控制中心根据物料的信息分配存储分线包括:所述控制中心获取物料的数量信息和类别信息,根据获取物料的数量信息和类别信息判断此类别物料的数量是否大于系统设定的最大存储值,若否,则根据物料的类别信息分配存储分线。10.根据权利要求9所述的一种立体存储系统控制方法,其特征在于,所述控制中心收到物料出库指令之后,包括:判断物料所在的存储分线的层级是否在一层,若是,则控制一层的存储分线和出库分线运动,若否,则控制二层的存储分线和出库分线运动。
技术总结
本申请是关于一种立体存储系统及其控制方法。该立体存储系统包括拆垛机器人和物料输送线;所述拆垛机器人用于将堆垛的物料拆垛后放在所述物料输送线的入口端;所述物料输送线包括摆转分线和N层存储分线;所述N层存储分线相互平行且沿竖直方向排布;所述摆转分线包括竖直摆转板,所述竖直摆转板能够在竖直方向摆转,且在摆转后与所述N层存储分线中的任一层存储分线对接。本申请提供的方案,在大型整垛物料无法在净空高度低的厂房进行立体存储的情况下,能够将堆垛的物料拆垛后进行分层的立体存储,不仅便于存储和拿取物料,还能最大化利用厂房空间,节省面积,满足现在自动化的需求。求。求。
技术研发人员:黄东海 傅后益 宋威 童铁鑫 袁琦尧 马勇军
受保护的技术使用者:珠海格力电器股份有限公司
技术研发日:2021.12.09
技术公布日:2022/5/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。