技术特征:
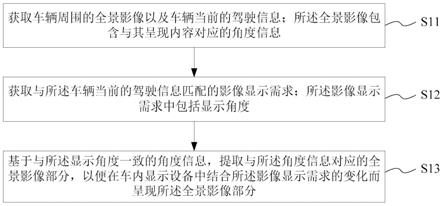
1.一种图像处理方法,其特征在于,所述方法包括以下步骤:获取车辆周围的全景影像以及车辆当前的驾驶信息,所述全景影像包含与其呈现内容对应的角度信息;获取与所述车辆当前的驾驶信息匹配的影像显示需求,所述影像显示需求中包括显示角度;以及基于与所述显示角度一致的角度信息,提取与所述角度信息对应的全景影像部分,以便在车内显示设备中结合所述影像显示需求的变化而呈现所述全景影像部分。2.根据权利要求1所述的方法,其中,所述车辆当前的驾驶信息至少包括车辆当前的方向盘角度信息、行驶速度信息和挡位信息。3.根据权利要求2所述的方法,其中,所述影像显示需求至少还包括刷新方向和刷新频率;所述车辆通过预设的传感器和/或导航定位数据确定所述车辆当前的方向盘角度信息、挡位信息和行驶速度信息;所述获取与所述车辆当前的驾驶信息匹配的影像显示需求包括以下步骤:基于所述传感器和/或所述导航定位数据计算所述全景影像的显示角度;基于所述挡位信息检测所述车辆的进退状态,进而基于所述进退状态确定所述全景影像的刷新方向;以及基于所述行驶速度信息确定所述全景影像的刷新频率。4.根据权利要求3所述的方法,其中,所述挡位信息包括d挡和r挡,所述方向盘角度信息包括左转角度和右转角度;基于所述方向盘角度信息计算所述全景影像的显示角度至少包括以下步骤之一:响应于确定所述方向盘角度信息为所述d挡与所述左转角度,将第一预设角度减去所述左转角度作为所述显示角度;响应于确定所述方向盘角度信息为所述d挡与所述右转角度,将所述右转角度作为所述显示角度;响应于确定所述方向盘角度信息为所述r挡与所述左转角度,将第二预设角度加上所述左转角度作为所述显示角度;以及响应于确定所述方向盘角度信息为所述r挡与所述右转角度,将第二预设角度减去所述右转角度作为所述显示角度。5.根据权利要求1所述的方法,其中,所述基于与所述显示角度一致的角度信息,提取与所述角度信息对应的全景影像部分包括以下步骤:基于所述角度信息建立一角度坐标系,以将所述角度坐标系叠加于所述全景影像中;将所述显示角度在所述角度坐标系中进行定位;以及提取所述显示角度于定位处的待显示图片。6.根据权利要求5所述的方法,其中,所述基于所述角度信息建立一角度坐标系包括以下步骤:将所述全景影像转换为球型图像;在所述球型图像中以水平线为中心标线,确定中心水平图像;以及对所述中心水平图像建立所述角度坐标系。7.根据权利要求1所述的方法,其中,所述方法还包括以下步骤:
基于所述影像显示需求的变化,连续确定不同时刻的所述待显示图片;以及将多张所述待显示图片按照时间先后顺序进行显示,以此基于所述影像显示需求的实时变化进行全景影像不同部分的相应显示。8.根据权利要求1所述的方法,其中,所述方法还包括以下步骤:经由电子设备呈现所述全景影像。9.根据权利要求1-8任一项所述的方法,其中,所述方法还包括:在所述车辆处于停车状态时,对所述全景影像进行图像识别,以识别车外的会车情况;对所述全景影像进行语音识别,以识别车外人员的语音内容;基于所述会车情况和所述语音内容,确定是否需要挪车;以及响应于确定需要挪车,向所述车辆的车主发送挪车警示。10.根据权利要求9所述的方法,其中,所述对所述全景影像进行图像识别,以识别车外的会车情况包括以下步骤:对所述全景影像中的他人车辆进行识别,基于所述全景影像与实景的呈现比例测算所述他人车辆与所述车辆之间的车距;将所述车距与预设车距阈值进行比较,以评估所述他人车辆正常通过的可能性;以及响应于确定所述车距小于所述预设车距阈值,判定车外的会车情况为拥堵。11.根据权利要求1-8任一项所述的方法,其中,所述方法还包括以下步骤:在所述车辆处于停车状态时,通过机器学习对所述全景影像进行图像识别,以识别车外人员的身份特征;基于所述身份特征,推测所述车外人员靠近所述车辆的意图;以及响应于确定所述车外人员靠近所述车辆的意图,向所述车辆的车主发送提示信息,以用于指示所述车外人员靠近所述车辆的意图和/或推荐应对措施。12.根据权利要求11所述的方法,其中,所述通过机器学习对所述全景影像进行图像识别,以识别车外人员的身份特征包括以下步骤:对所述全景影像进行静态图片提取;以及将所述静态图片输入预先训练的人员身份识别模型中进行图像识别,所述图像识别的因素包括人员着装及人员随身携带的标识物品。13.一种非瞬态计算机可读存储介质,其上存储有机器可执行指令,所述机器可执行指令在被执行时使机器执行根据权利要求1-12中任一项所述的方法的步骤。14.一种电子设备,包括:存储器,被配置为存储一个或多个计算机程序;以及处理器,耦合至所述存储器并且被配置为执行所述一个或多个计算机程序使所述电子设备执行根据权利要求1-12中任一项所述的方法。15.一种图像处理系统,其特征在于,所述图像处理系统包括:全景影像设备和如权利要求14所述的电子设备;所述全景影像设备与所述电子设备连接;所述全景影像设备用于生成全景影像,并将其发送至所述电子设备;所述电子设备用于获取车辆周围的全景影像以及车辆当前的驾驶信息;所述全景影像包含与其呈现内容对应的角度信息;获取与所述车辆当前的驾驶信息匹配的影像显示需求;所述影像显示需求中包括显示角度;基于与所述显示角度一致的角度信息,提取与所述角度信息对应的全景影像部分,以便在车内显示设备中结合所述影像显示需求的变化而呈
现所述全景影像部分。
技术总结
本发明提供一种图像处理方法、介质、设备及图像处理系统,所述图像处理方法包括:获取车辆周围的全景影像以及车辆当前的驾驶信息;全景影像包含与其呈现内容对应的角度信息;获取与车辆当前的驾驶信息匹配的影像显示需求;影像显示需求中包括显示角度;基于与显示角度一致的角度信息,提取与角度信息对应的全景影像部分,以便在车内显示设备中结合影像显示需求的变化而呈现全景影像部分。本发明通过提供全景影像可以展示车辆各角度图像,并对采集的全景影像进行处理,为车主的生活带来更多安全保障以及提供更多便捷信息。保障以及提供更多便捷信息。保障以及提供更多便捷信息。
技术研发人员:侯金龙
受保护的技术使用者:上海博泰悦臻网络技术服务有限公司
技术研发日:2020.10.29
技术公布日:2022/5/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。