技术特征:
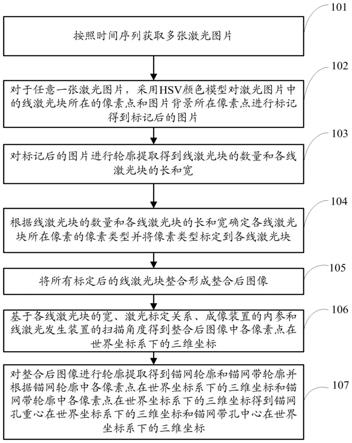
1.一种矿井低光照下支护孔中心检测方法,其特征在于,包括:按照时间序列获取多张激光图片,所述激光图片为线激光发生装置在扫描支护系统的过程中成像装置拍摄的图片;所述支护系统包括支护支架和锚网,所述锚网设置在所述支护支架上;对于任意一张激光图片,采用hsv颜色模型对所述激光图片中的线激光块所在的像素点和图片背景所在像素点进行标记得到标记后的图片;对所述标记后的图片进行轮廓提取得到所述线激光块的数量和各所述线激光块的长和宽;根据所述线激光块的数量和各线激光块的长和宽确定各线激光块所在像素的像素类型并将所述像素类型标定到各所述线激光块;所述像素类型包括背景像素、锚网像素和锚网带像素;将所有标定后的线激光块整合形成整合后图像;基于各所述线激光块的宽、激光标定关系、所述成像装置的内参和所述线激光发生装置的扫描角度得到所述整合后图像中各像素点在世界坐标系下的三维坐标,所述激光标定关系为标定的所述支护系统到所述激光发生装置之间的距离与线激光块的宽度之间的关系;对所述整合后图像进行轮廓提取得到锚网轮廓和锚网带轮廓并根据所述锚网轮廓中各像素点在世界坐标系下的三维坐标和所述锚网带轮廓中各像素点在世界坐标系下的三维坐标得到锚网孔重心在世界坐标系下的三维坐标和锚网带孔中心在世界坐标系下的三维坐标。2.根据权利要求1所述的一种矿井低光照下支护孔中心检测方法,其特征在于,所述对所述标记后的图片进行轮廓提取得到所述线激光块的数量和各所述线激光块的长和宽,具体包括:对所述标记后的图片进行轮廓提取得到所述线激光块的数量和各所述线激光块的轮廓坐标;根据各所述线激光块的轮廓坐标计算各所述线激光块的长和宽。3.根据权利要求1所述的一种矿井低光照下支护孔中心检测方法,其特征在于,所述对所述整合后图像进行轮廓提取得到锚网轮廓和锚网带轮廓并根据所述锚网轮廓中各像素点在世界坐标系下的三维坐标和所述锚网带轮廓中各像素点在世界坐标系下的三维坐标得到锚网孔重心在世界坐标系下的三维坐标和锚网带孔中心在世界坐标系下的三维坐标,具体包括:对所述整合后图像进行图像分割得到第一图像和第二图像;所述第一图像包括锚网像素和背景像素;所述第二图像包括锚网带像素和背景像素;对所述第一图像和所述第二图像分别进行轮廓提取得到锚网轮廓和锚网带轮廓并根据所述锚网轮廓中各像素点在世界坐标系下的三维坐标和所述锚网带轮廓中各像素点在世界坐标系下的三维坐标得到锚网孔重心在世界坐标系下的三维坐标和锚网带孔中心在世界坐标系下的三维坐标。4.根据权利要求1所述的一种矿井低光照下支护孔中心检测方法,其特征在于,所述根据所述线激光块的数量和各线激光块的长和宽确定各线激光块所在像素的像素类型,具体
包括:根据各线激光块的长和宽确定各线激光块的长宽比;一张所述激光图片中的所述线激光块的数量大于第一设定阈值且所述线激光块的长宽比大于第二设定阈值则所述线激光块的像素类型为背景像素;一张所述激光图片中的所述线激光块的数量大于所述第一设定阈值且所述线激光块的长宽比小于第三设定阈值则所述线激光块的像素类型为锚网像素;所述线激光块为一条直线且在第一设定数量的图中出现则所述线激光块的像素类型为锚网像素;所述线激光块为一条直线且在第二设定数量的图中出现且所述线激光块数量小于第四设定阈值且所述线激光块的长宽比大于第五设定阈值则所述线激光块的像素类型为锚网带;所述线激光块为一条直线且在所述第二设定数量的图中出现且所述线激光块数量小于所述第四设定阈值且所述线激光块的长宽比小于第六设定阈值则所述线激光块的像素类型为背景。5.根据权利要求1所述的一种矿井低光照下支护孔中心检测方法,其特征在于,所述基于各所述线激光块的宽、激光标定关系、所述成像装置的内参和所述线激光发生装置的扫描角度得到所述整合后图像中各像素点在世界坐标系下的三维坐标,具体包括:根据所述线激光块的宽和所述激光标定关系得到所述线激光发生装置到所述支护系统的距离;根据所述线激光发生装置到所述支护系统的距离和所述线激光发生装置的扫描角度确定线激光块在世界坐标系下z方向上的坐标;基于所述成像装置的内参和所述线激光块在世界坐标系下z方向上的坐标得到整合后图像中各像素点在世界坐标系下的三维坐标。6.一种矿井低光照下支护孔中心检测装置,其特征在于,包括:支护系统、扫描成像子系统和数据处理子系统;所述支护系统包括支护支架、锚网带和锚网,所述锚网设置在所述支护支架上,所述锚网带用于将所述锚网固定在所述支护支架上;所述扫描成像子系统包括:线激光发生装置和成像装置,所述锚网和所述锚网带设置在所述线激光发生装置的出射光路上,所述成像装置设置在所述锚网和所述锚网带对所述线激光发生装置的反射光路上,所述成像装置用于拍摄多张激光图片;所述数据处理子系统与所述成像装置连接,所述数据处理子系统用于获取所述成像装置拍摄的激光图片,并按照上述权利要求1-5中任意一项所述的矿井低光照下支护孔中心检测方法对所述激光图片进行处理。7.根据权利要求6所述的一种矿井低光照下支护孔中心检测装置,其特征在于,所述数据处理子系统包括:依次连接的图像处理模块、三维重建模块和轮廓提取模块;所述图像处理模块与所述成像装置连接;所述图像处理模块用于获取所述成像装置拍摄的激光图片,根据所述线激光块的数量和所述线激光块的长和宽确定各所述线激光块所在像素的像素类型并将所述像素类型标定到各所述线激光块并将所有标定后的线激光块整合形成整合后图像;所述像素类型包括
背景像素、锚网像素和锚网带像素;所述三维重建模块用于基于各所述线激光块的宽、激光标定关系、所述成像装置的内参和所述线激光发生装置的扫描角度得到所述整合后图像中各像素点在世界坐标系下的三维坐标;所述激光标定关系为标定的所述支护系统到所述激光发生装置之间的距离与线激光块的宽度之间的关系;所述轮廓提取模块用于对所述整合后图像进行轮廓提取得到锚网轮廓和锚网带轮廓并根据所述锚网轮廓中各像素点在世界坐标系下的三维坐标和所述锚网带轮廓中各像素点在世界坐标系下的三维坐标得到锚网孔重心在世界坐标系下的三维坐标和锚网带孔中心在世界坐标系下的三维坐标。8.根据权利要求7所述的一种矿井低光照下支护孔中心检测装置,其特征在于,所述数据处理子系统还包括:相机标定模块,所述相机标定模块用于标定所述成像装置的内参和标定激光标定关系。9.根据权利要求7所述的一种矿井低光照下支护孔中心检测装置,其特征在于,所述三维重建模块具体包括:距离确定子模块、z坐标确定子模块和三维坐标确定子模块;所述距离确定子模块,用于根据所述线激光块的宽和所述激光标定关系得到所述线激光发生装置到所述支护系统的距离;所述z坐标确定子模块,用于根据所述线激光发生装置到所述支护系统的距离和所述线激光发生装置的扫描角度确定线激光块在世界坐标系下z方向上的坐标;所述三维坐标确定子模块,用于基于所述成像装置的内参和所述线激光块在世界坐标系下z方向上的坐标得到整合后图像中各像素点在世界坐标系下的三维坐标。10.根据权利要求7所述的一种矿井低光照下支护孔中心检测装置,其特征在于,所述图像处理模块包括:图像hsv分割子模块、轮廓提取子模块、类型判断子模块和类型图像生成子模块;所述hsv分割子模块,用于采用hsv颜色模型对所述激光图片中的线激光块所在的像素点和图片背景所在像素点进行标记得到标记后的图片;所述轮廓提取子模块,用于对所述标记后的图片进行轮廓提取得到所述线激光块的数量和各所述线激光块的长和宽;所述类型判断子模块,用于根据所述线激光块的数量和各线激光块的长和宽确定各线激光块所在像素的像素类型并将所述像素类型标定到各所述线激光块;所述类型图像生成子模块,用于将所有标定后的线激光块整合形成整合后图像。
技术总结
本发明涉及一种矿井低光照下支护孔中心检测方法及装置。所述装置包括:获取多张激光图片,采用HSV颜色模型对所述激光图片中的线激光块所在的像素点和图片背景所在像素点进行标记得到标记后的图片。对标记后的图片进行轮廓提取得到线激光块的数量和线激光块的长、宽。根据线激光块的数量、长和宽确定线激光块所在像素的像素类型并将像素类型标定到线激光块。将所有标定后的线激光块整合形成整合后图像。根据线激光块的宽和成像装置的内参得到整合后图像中像素点的三维坐标。对整合后图像进行轮廓提取得到锚网和锚网带轮廓并根据轮廓中像素点的三维坐标得到锚网孔中心和锚网带孔中心的三维坐标。本发明可以实现锚杆位置的自动确定。的自动确定。的自动确定。
技术研发人员:兰媛 刘智飞 熊晓燕 乔葳 袁科研 牛蔺楷 黄家海 吕继双 安四元 闫金宝
受保护的技术使用者:太原理工大学
技术研发日:2022.02.08
技术公布日:2022/5/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。