技术特征:
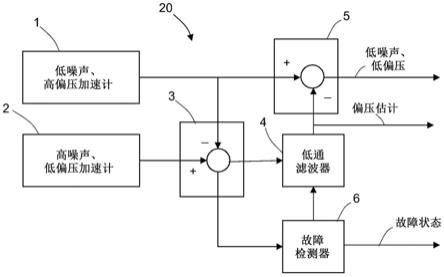
1.一种传感器数据融合系统(20),包括:第一加速计(1),具有低噪声和高偏压;第二加速计(2),具有高噪声和低偏压;第一减法器(3),连接为接收来自所述第一加速计的信号和来自所述第二加速计的信号并且被配置为输出表示来自所述第一加速计的信号和来自所述第二加速计的信号之间的差的第一差值信号;第一滤波器(4),连接为从所述第一减法器接收所述第一差值信号并且被配置为输出表示所述第一加速计和所述第二加速计的估计相对偏压的信号;以及第二减法器(5),连接为接收来自所述第一加速计的信号和来自所述第一滤波器的信号并且被配置为输出表示来自所述第一加速计的信号和来自所述第一滤波器的信号之间的差的第二差值信号。2.根据权利要求1所述的传感器数据融合系统,其中,所述第二加速计是重力计。3.根据权利要求1或2所述的传感器数据融合系统,其中,所述第二差值信号具有低噪声和低偏压。4.根据权利要求中1或2所述的传感器数据融合系统,其中,所述滤波器被配置为在使表示所述估计相对偏压的信号通过的同时滤除大部分噪音。5.根据权利要求4所述的传感器数据融合系统,其中,所述滤波器是低通滤波器。6.根据权利要求4所述的传感器数据融合系统,其中,所述滤波器是卡尔曼滤波器。7.根据权利要求1或2所述的传感器数据融合系统,进一步包括:故障检测器(6),连接为接收所述第一差值信号,并且如果所述第一差值信号持久地超过指定的差值阈值,则所述故障检测器被配置为输出故障真信号。8.根据权利要求1或2所述的传感器数据融合系统,进一步包括:第三加速计(a),具有低噪声和高偏压;第三减法器(3a),连接为接收来自所述第二加速计的信号和来自所述第三加速计的信号并且被配置为输出表示来自所述第二加速计的信号和来自所述第三加速计的信号之间的差的第三差值信号;第二滤波器(4a),连接为接收由所述第三减法器输出的所述第三差值信号并且被配置为输出表示所述第二加速计和所述第三加速计的估计相对偏压的信号;以及第四减法器(5a),连接为接收来自所述第三加速计的信号和来自所述第二滤波器的信号并且被配置为输出表示来自所述第三加速计的信号和来自所述第二滤波器的信号之间的差的第四差值信号。9.根据权利要求8所述的传感器数据融合系统,其中,所述第二加速计是重力计。10.根据权利要求8所述的传感器数据融合系统,进一步包括:第一故障检测器(6),连接为接收所述第一差值信号,并且被配置为如果所述第一差值信号持久地超过指定的差值阈值,则输出故障真信号,否则,输出故障假信号;第二故障检测器(6a),连接为接收所述第三差值信号,并且被配置为如果所述第三差值信号持久地超过所述指定的差值阈值,则输出故障真信号,否则,输出故障假信号;以及处理设备(8),连接至所述第一故障检测器和所述第二故障检测器以及所述第三减法器和所述第四减法器,其中,所述处理设备被配置为:
如果所述第一故障检测器输出故障假信号,而所述第二故障检测器输出故障真信号,则输出所述第一差值信号;并且如果所述第一故障检测器输出故障真信号,而所述第二故障检测器输出故障假信号,则输出所述第二差值信号。11.根据权利要求10所述的传感器数据融合系统,其中,如果所述第一故障检测器与所述第二故障检测器输出相应的故障假信号,则所述处理设备则进一步被配置为输出所述第一差值信号与所述第二差值信号的加权和。12.根据权利要求10所述的传感器数据融合系统,其中,如果所述第一故障检测器和所述第二故障检测器输出相应的故障真信号,则所述处理设备则进一步被配置为输出由具有之前估计偏压的所述第一加速计和所述第三加速计输出的所述信号的加权和。13.一种用于融合传感器数据的方法,包括:使用具有低噪声和高偏压的第一加速计(1)输出第一测量信号,所述第一测量信号表示在平台的参考系的垂直方向上的指定力的第一测量值;使用具有高噪声和低偏压的第二加速计(2)输出第二测量信号,所述第二测量信号表示在所述平台的所述参考系的所述垂直方向上的指定力的第二测量值;生成表示所述第一测量信号与所述第二测量信号之间的差的第一差值信号;对所述第一差值信号进行滤波,以产生表示所述第一加速计和所述第二加速计的估计相对偏压的第一偏压估计信号;并且生成表示所述第一测量信号与所述第一偏压估计信号之间的差的第二差值信号。14.根据权利要求13所述的方法,进一步包括:如果所述第一差值信号并不持久地超过指定的差值阈值,在导航过程中则使用所述第一差值信号。15.根据权利要求13或14所述的方法,进一步包括:如果所述第一差值信号持久地超过指定的差值阈值,则生成故障真信号。16.根据权利要求13或14所述的方法,进一步包括:使用具有低噪声和高偏压的第三加速计(1a)输出第三测量信号,所述第三测量信号表示在所述平台的所述参考系的所述垂直方向上的指定力的第三测量值;生成表示所述第二测量信号与所述第三测量信号之间的差的第三差值信号;对所述第三差值信号进行滤波,以产生表示所述第二加速计和所述第三加速计的估计相对偏压的第二偏压估计信号;并且生成表示所述第三测量信号与所述第二偏压估计信号之间的差的第四差值信号。17.根据权利要求16所述的方法,进一步包括:如果第一差值信号持久地超过指定的差值阈值,则生成故障真信号,否则,生成故障假信号;如果所述第三差值信号持久地超过所述指定的差值阈值,则生成故障真信号,否则,生成故障假信号;并且如果所述第一差值信号与所述第二差值信号中的一个差值信号并不持久地超过指定的差值阈值并且所述第一差值信号与所述第二差值信号中的另一个差值信号持久地超过所述指定的差值阈值,在导航过程中则使用所述第一差值信号与所述第二差值信号中的所述一个差值信号。
18.一种用于导航平台的系统(10),包括:惯性导航系统(11),被配置为生成导航方案并且包括具有低噪声和高偏压的加速计(1);重力计(2),具有高噪声和低偏压;引导和控制系统(31),通信地耦接至所述惯性导航系统并且被配置为根据所述导航方案控制所述平台;传感器数据融合模块(23),被配置为从所述加速计和所述重力计的输出生成表示相对偏压估计的偏压估计信号,并且然后,生成表示通过从所述加速计的所述输出中减去所述偏压估计信号而推导的所述加速计的校正输出的信号;时间匹配缓冲器(15),通信地耦接至所述惯性导航系统并且被配置为利用时间标记存储表示所述平台的位置、速率以及姿态的数据;重力异常数据库(17),存储在非临时性的有形计算机可读存储介质中;重力计输出预测器(16),通信地耦接为从所述时间匹配缓冲器接收所述平台的加时间标记的位置、速率以及姿态并且从所述重力异常数据库中检索重力异常数据并且被配置为输出表示所述重力计的所述输出的预测的预测信号;残差与矩阵计算模块(25),通信地耦接为接收所述预测信号以及所述加速计的所述校正输出并且被配置为基于所述预测信号与所述加速计的所述校正输出之间的差生成残差、h矩阵以及r矩阵;以及卡尔曼滤波器(27),被配置为基于所述预测信号与所述加速计的所述校正输出之间的述差生成位置校正并且然后将所述位置校正发送至所述惯性导航系统。19.根据权利要求18所述的系统,其中,所述传感器数据融合模块包括:第一减法器(3),连接为接收来自所述加速计的信号和来自所述重力计的信号并且被配置为输出表示来自所述加速计和所述重力计的信号之间的差的第一差值信号;滤波器(4),连接为接收由所述第一减法器输出的所述第一差值信号并且被配置为输出所述偏压估计信号;以及第二减法器(5),连接为接收来自所述加速计的信号和所述偏压估计信号并且被配置为输出表示来自所述加速计的信号与所述偏压估计信号之间的差的第二差值信号。20.根据权利要求19所述的系统,其中,所述传感器数据融合模块进一步包括:故障检测器(6),连接为接收所述第一差值信号,并且如果所述第一差值信号持久地超过指定的差值阈值,则所述故障检测器被配置为输出故障真信号。21.一种用于导航平台的方法,包括:使用第一加速计(1)输出第一测量信号,所述第一测量信号表示在平台的参考系的垂直方向上的指定力的第一测量值;使用所述第一测量信号生成惯性导航方案;使用第二加速计(2)输出第二测量信号,所述第二测量信号表示在所述平台的所述参考系的所述垂直方向上的指定力的第二测量值;基于所述第一测量信号与所述第二测量信号之间的差生成表示所测量的指定力的信号;使用导航状态的历史和重力异常数据库生成表示所预测的指定力的信号;
基于所预测的指定力与所测量的指定力之间的差生成惯性导航方案校正;通过对所述惯性导航方案应用惯性导航方案校正而生成所校正的惯性导航方案;并且根据所校正的惯性导航方案控制所述平台。22.根据权利要求21所述的方法,其中,所述第一加速计具有低噪声和高偏压并且所述第二加速计具有高噪声和低偏压。23.根据权利要求22所述的方法,其中,基于所述第一测量信号与所述第二测量信号之间的差生成表示所测量的指定力的信号包括:对差值信号进行滤波,以产生表示所述第一加速计和所述第二加速计的估计相对偏压的偏压估计信号;和生成表示所述第一测量信号与所述偏压估计信号之间的差的差值信号。
技术总结
具有噪声降低和故障保护的传感器数据融合系统。传感器数据融合系统(20)对由具有不同属性的相应加速计获取的数据进行融合。例如,当测量指定力时,一个加速计(1)具有低噪声和高偏压,而另一加速计(2)具有高噪声和低偏压。高噪声、低偏压加速计可以是重力计。重力计与传统的加速计测量同一物理变量,即,指定力。通过对昂贵的重力计与低成本的加速计进行组合,可以实现具有低噪声和低偏压的合成传感器。在重力异常的参考导航系统(10)中可以利用该合成传感器来实现导航性能的改善。成传感器来实现导航性能的改善。成传感器来实现导航性能的改善。
技术研发人员:李荣盛 尚
受保护的技术使用者:波音公司
技术研发日:2021.11.03
技术公布日:2022/5/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。