技术特征:
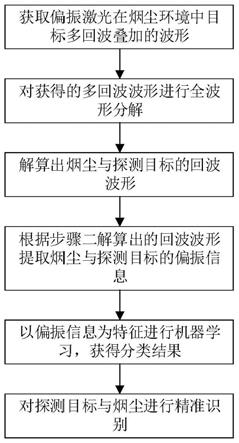
1.一种烟尘环境下目标识别方法,其特征在于:包括以下步骤:采集探测目标在烟尘环境下叠加的多回波波形;所述多回波波形包括烟尘与探测目标叠加的回波波形;对采集到的多回波波形进行全波形分解,解算出烟尘与探测目标各自的回波波形,并从中提取出波形的幅值参数;根据提取出的波形的幅值参数提取烟尘与探测目标的偏振信息;以所述偏振信息为特征进行机器学习,对探测目标与烟尘进行识别。2.根据权利要求1所述的一种烟尘环境下目标识别方法,其特征在于:所述采集探测目标在烟尘环境下叠加的多回波波形的步骤中,探测目标所处方位包括烟尘管道内和激光发生模块与烟尘管道组成的空间分布中靠近烟尘管道一侧的外部范围。3.根据权利要求1所述的一种烟尘环境下目标识别方法,其特征在于:所述采集探测目标在烟尘环境下叠加的多回波波形的具体方法为:利用激光器在第一偏振片的作用下产生偏振,在经过烟尘环境下探测目标后,接收装置接收由烟尘与探测目标叠加的回波波形。4.根据权利要求1所述的一种烟尘环境下目标识别方法,其特征在于:基于小波去噪、初始值预估计以及智能优化算法对采集到的多回波波形进行全波形分解,分别获得烟尘与探测目标的回波波形以及对应的幅值参数。5.根据权利要求1所述的一种烟尘环境下目标识别方法,其特征在于:所述根据提取出的波形的幅值参数提取烟尘与探测目标的偏振信息的具体方法为:根据提取出的烟尘与探测目标的回波波形幅值,通过相应的理论公式,分别计算出烟尘与探测目标的偏振信息参数,得到烟尘与探测目标的偏振信息;所述偏振信息参数包括反射光的总强度i、偏振椭圆半长轴的大小q和方向u、物体表面的偏振反射辐射i
p
、线偏振度dolp以及偏振角α;所述偏振信息的计算方法为:i=(l0°
l
45
°
l
90
°
l
135
°
)/2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)q=l0°-l
90
°
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)u=l
45
°-l
135
°
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)(4)(4)其中,l
0。
、l
45。
、l
90。
、l
135。
分别为斯托克斯参数在其透射轴为水平、 45
°
、垂直、 135
°
上所需的强度分量由以下公式求得:所需的强度分量由以下公式求得:
其中,i
x
表示起偏原件与检偏原件相位相差x度时的光强值,通过实验直接测量得到;式(8)至式(11)中,x分别选取了0
°
、45
°
、90
°
、135
°
、180
°
、225
°
、270
°
、315
°
。6.根据权利要求1所述的一种烟尘环境下目标识别方法,其特征在于:所述对探测目标与烟尘进行识别的方法为:以探测目标与烟尘环境的偏振信息作为特征向量,将烟尘与探测目标的偏振信息作为原始数据样本划分为测试集与训练集,利用训练集进行机器学习,获得最优的分类结果,以测试集对分类结果进行测试,实现对探测目标和烟尘的识别。7.根据权利要求6所述的一种烟尘环境下目标识别方法,其特征在于:所述原始数据包括选取探测目标与烟尘环境的反射光的总强度i、偏振椭圆半长轴的大小q和方向u、物体表面的偏振反射辐射i
p
、线偏振度dolp以及偏振角α组成的6维向量。8.根据权利要求6所述的一种烟尘环境下目标识别方法,其特征在于:所述原始数据划分时,分别在两种探测目标所处方位的6维向量中,随机选取若干组作为训练集,剩余组作为测试集。9.根据权利要求6所述的一种烟尘环境下目标识别方法,其特征在于:基于svm算法对训练集进行训练,寻找到一个最优超平面,使得训练集中的样本点到超平面的距离最短,进而得到一个最优的分类结果。
技术总结
本发明属于目标探测识别技术领域,公开了一种烟尘环境下目标识别方法,包括以下步骤:采集探测目标在烟尘环境下叠加的多回波波形;所述多回波波形包括烟尘与探测目标叠加的回波波形;对采集到的多回波波形进行全波形分解,解算出烟尘与探测目标各自的回波波形,并从中提取出波形的幅值参数;根据提取出的波形的幅值参数提取烟尘与探测目标的偏振信息;以所述偏振信息为特征进行机器学习,对探测目标与烟尘进行识别。本发明的有益效果为:能够精准识别烟尘环境下的目标。准识别烟尘环境下的目标。准识别烟尘环境下的目标。
技术研发人员:徐孝彬 瞿勤阳 冉莹莹 吴家林 王佳立 谭治英 骆敏舟
受保护的技术使用者:河海大学常州校区
技术研发日:2021.12.13
技术公布日:2022/5/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。