技术特征:
1.一种轨迹预测方法,其特征在于,所述方法包括:获取地图图像,所述地图图像中包括车道中心线,所述车道中心线上具有等间距设置的若干个节点,每一节点具有距离特征,所述节点的距离特征中融合有与所述节点具有不同距离的其他车道中心线节点的距离特征;基于车辆在所述地图图像中的位置,确定与所述车辆位置最近的车道中心线节点,作为目标节点;将所述目标节点的距离特征与所述车辆的历史轨迹特征进行向量合并,得到轨迹预测向量;基于所述轨迹预测向量,预测所述车辆在所述地图图像中的行驶轨迹。2.根据权利要求1所述的轨迹预测方法,其特征在于,每一节点的距离特征,采用如下方式确定:在所述地图图像上确定第一节点;基于所述第一节点的位置,确定区域地图图像,所述区域地图图像中包括所述第一节点,以及与所述第一节点之间具有不同距离的多个第二节点;基于所述多个第二节点与所述第一节点之间的距离,提取所述多个第二节点的距离特征,并将所述多个第二节点的距离特征进行合并,得到所述第一节点的距离特征。3.根据权利要求2所述的轨迹预测方法,其特征在于,基于所述多个第二节点与所述第一节点之间的距离,提取所述多个第二节点的距离特征,并将所述多个第二节点的距离特征进行合并,得到所述第一节点的距离特征,包括:将所述多个第二节点,按照与所述第一节点之间的距离,划分为多个类别,其中,同一类别中的第二节点与所述第一节点之间的距离相同;分别提取所述多个类别中同一类别的第二节点的距离特征,并将提取到的不同类别的距离特征拼接后,得到所述第一节点的距离特征。4.根据权利要求2或3所述的轨迹预测方法,其特征在于,基于所述第一节点的位置,确定区域地图图像,包括:以所述第一节点为中心,确定具有预设范围的区域地图图像,在所述预设范围内至少包括与所述第一节点直接相邻的第二节点,以及与所述第一节点间接相邻的第二节点。5.根据权利要求4所述的轨迹预测方法,其特征在于,提取所述多个第二节点的距离特征,包括:基于点云数据的深度学习模型提取所述多个第二节点的距离特征。6.根据权利要求4所述的轨迹预测方法,其特征在于,所述车辆的历史轨迹特征采用如下方式确定:获取所述车辆的历史轨迹;基于长短时记忆回归神经网络提取所述历史轨迹的特征,得到所述车辆的历史轨迹特征。7.一种轨迹预测装置,其特征在于,所述装置包括:获取单元,用于获取地图图像,所述地图图像中包括车道中心线,所述车道中心线上具有等间距设置的若干个节点,每一节点具有距离特征,所述节点的距离特征中融合有与所述节点具有不同距离的其他车道中心线节点的距离特征;
确定单元,用于基于车辆在所述地图图像中的位置,确定与所述车辆位置最近的车道中心线节点,作为目标节点,并将所述目标节点的距离特征与所述车辆的历史轨迹特征进行向量合并,得到轨迹预测向量;预测单元,用于基于所述轨迹预测向量,预测所述车辆在所述地图图像中的行驶轨迹。8.根据权利要求7所述的轨迹预测装置,其特征在于,每一节点的距离特征,采用如下方式确定:在所述地图图像上确定第一节点;基于所述第一节点的位置,确定区域地图图像,所述区域地图图像中包括所述第一节点,以及与所述第一节点之间具有不同距离的多个第二节点;基于所述多个第二节点与所述第一节点之间的距离,提取所述多个第二节点的距离特征,并将所述多个第二节点的距离特征进行合并,得到所述第一节点的距离特征。9.根据权利要求8所述的轨迹预测装置,其特征在于,所述确定单元采用如下方式基于所述多个第二节点与所述第一节点之间的距离,提取所述多个第二节点的距离特征,并将所述多个第二节点的距离特征进行合并,得到所述第一节点的距离特征:将所述多个第二节点,按照与所述第一节点之间的距离,划分为多个类别,其中,同一类别中的第二节点与所述第一节点之间的距离相同;分别提取所述多个类别中同一类别的第二节点的距离特征,并将提取到的不同类别的距离特征拼接后,得到所述第一节点的距离特征。10.根据权利要求8或9所述的轨迹预测装置,其特征在于,所述确定单元采用如下方式基于所述第一节点的位置,确定区域地图图像:以所述第一节点为中心,确定具有预设范围的区域地图图像,在所述预设范围内至少包括与所述第一节点直接相邻的第二节点,以及与所述第一节点间接相邻的第二节点。11.根据权利要求10所述的轨迹预测装置,其特征在于,所述确定单元采用如下方式提取所述多个第二节点的距离特征:基于点云数据的深度学习模型提取所述多个第二节点的距离特征。12.根据权利要求10所述的轨迹预测装置,其特征在于,所述车辆的历史轨迹特征采用如下方式确定:获取所述车辆的历史轨迹;基于长短时记忆回归神经网络提取所述历史轨迹的特征,得到所述车辆的历史轨迹特征。13.一种轨迹预测装置,其特征在于,包括:处理器;用于存储处理器可执行指令的存储器;其中,所述处理器被配置为:执行权利要求1至6中任意一项所述的轨迹预测方法。14.一种存储介质,其特征在于,所述存储介质中存储有指令,当所述存储介质中的指令由终端的处理器执行时,使得终端能够执行权利要求1至6中任意一项所述的轨迹预测方法。
技术总结
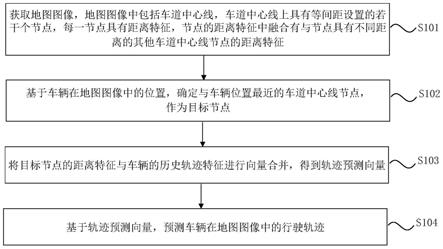
本公开是关于一种轨迹预测方法、装置及存储介质。轨迹预测方法包括:获取地图图像,地图图像中包括车道中心线,车道中心线上具有等间距设置的若干个节点,每一节点具有距离特征,节点的距离特征中融合有与节点具有不同距离的其他车道中心线节点的距离特征;基于车辆在地图图像中的位置,确定与车辆位置最近的车道中心线节点,作为目标节点;将目标节点的距离特征与车辆的历史轨迹特征进行向量合并,得到轨迹预测向量;基于轨迹预测向量,预测车辆在地图图像中的行驶轨迹。通过本公开实施例,将距离特征与车辆历史轨迹合并得到轨迹预测向量,以基于轨迹预测向量预测车辆行驶轨迹,能够保留地图图像中车道线的拓扑结构,提高轨迹预测的准确性。预测的准确性。预测的准确性。
技术研发人员:段志祥 杨奎元
受保护的技术使用者:北京小米移动软件有限公司
技术研发日:2021.11.19
技术公布日:2022/5/31
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。