技术特征:
1.一种坐标定位机器,包括:多条驱动轴线,用于将可移动结构定位在所述机器的工作容积内;多条平衡轴线,用于使所述可移动结构平衡;以及力产生器,用于产生施加到所述平衡轴线中的至少一条平衡轴线上的平衡力;其中,所述平衡轴线包括线性平衡轴线,并且其中,所述平衡力被施加到所述线性平衡轴线上。2.一种坐标定位机器,包括:多条驱动轴线,用于将可移动结构定位在所述机器的工作容积内;多条平衡轴线,用于使所述可移动结构平衡;以及力产生器,用于产生施加到所述平衡轴线中的至少一条平衡轴线上的平衡力;其中,所述平衡轴线和所述力产生器相互被布置成使得所述可移动结构在垂直于重力的方向上的移动,在除了由于所述力产生器围绕至多一条旋转平衡轴线的旋转之外,基本上不导致所述力产生器的净移动和/或基本上不导致对所述力产生器做功。3.一种坐标定位机器,包括:多条驱动轴线,用于将可移动结构定位在所述机器的工作容积内;多条平衡轴线,用于使所述可移动结构平衡;以及力产生器,用于产生施加到所述平衡轴线中的至少一条平衡轴线上的平衡力;其中,所述平衡轴线串联布置,其中,所述平衡轴线包括至少一条旋转平衡轴线,并且其中,所述力产生器布置在串联的所述平衡轴线中的第一旋转平衡轴线的后面或距所述第一旋转平衡轴线预定水平距离处。4.一种坐标定位机器,包括:多条驱动轴线,用于将可移动结构定位在所述机器的工作容积内;多条平衡轴线,用于使所述可移动结构平衡;以及力产生器,用于产生施加到所述平衡轴线中的至少一条平衡轴线上的平衡力;其中,所述平衡轴线与在所述机器的所述力产生器与固定结构之间的至多一条旋转平衡轴线串联布置。5.如任一前述权利要求所述的坐标定位机器,包括用于将所述平衡力传递给所述可移动结构的联动装置。6.如权利要求5所述的坐标定位机器,其中,所述联动装置适于提供所述可移动结构在垂直于重力的方向上的移动,同时使所述平衡力基本上不做功。7.如任一前述权利要求所述的坐标定位机器,其中,所述平衡轴线串联布置。8.如权利要求7所述的坐标定位机器,包括在所述机器的所述力产生器与固定结构之间的至多一条旋转平衡轴线。9.如任一前述权利要求所述的坐标定位机器,其中,所述平衡轴线包括至少一条线性平衡轴线。10.如权利要求9所述的坐标定位机器,其中,所述线性平衡轴线或每条线性平衡轴线具有相对于重力基本上恒定的取向。11.如任一前述权利要求所述的坐标定位机器,其中,所述平衡轴线包括基本上彼此垂直布置的第一线性平衡轴线和第二线性平衡轴线。
12.如权利要求11在从属于权利要求5时所述的坐标定位机器,其中,所述第二线性平衡轴线由所述联动装置提供。13.如权利要求12所述的坐标定位机器,其中,所述联动装置是scott russell联动装置,和/或其中,所述联动装置适于产生从线性到线性的基本上垂直的运动变化。14.如任一前述权利要求所述的坐标定位机器,其中,所述平衡力被施加到所述多条平衡轴线中的预定线性平衡轴线上。15.如权利要求14所述的坐标定位机器,其中,所述预定线性平衡轴线的取向基本上不随所述驱动轴线的取向和/或致动的变化而变化,例如其中,所述预定线性平衡轴线具有相对于重力基本上恒定的取向,比如与重力基本上对齐的取向。16.如权利要求14或15在从属于权利要求11时所述的坐标定位机器,其中,所述预定线性平衡轴线是所述第一线性平衡轴线。17.如权利要求14、15或16在从属于权利要求5时所述的坐标定位机器,其中,所述联动装置适于吸收所述可移动结构的水平移动并且将所述可移动结构的竖直移动转换成所述联动装置沿着所述预定线性平衡轴线的对应竖直移动。18.如权利要求14至17中任一项在从属于权利要求5时所述的坐标定位机器,其中,所述可移动结构经由所述联动装置沿着所述预定线性平衡轴线被平衡,例如,所述可移动结构的至少一部分重量经由所述联动装置由沿着所述预定线性平衡轴线施加到所述联动装置上的基本上恒定的平衡力来支撑。19.如权利要求14至18中任一项在从属于权利要求5时所述的坐标定位机器,包括至少一个支撑构件,其中所述至少一个支撑构件联接到所述预定线性平衡轴线,所述至少一个支撑构件优选地布置成沿着所述预定线性平衡轴线可滑动地移动,其中,所述平衡力被布置成作用在所述至少一个支撑构件上,并且其中,所述联动装置联接在所述可移动结构与所述至少一个支撑构件之间。20.如权利要求19所述的坐标定位机器,其中,由所述驱动布置引起的所述可移动结构的竖直移动被所述联动装置转换成所述至少一个支撑构件的对应竖直移动,从而导致施加到所述至少一个支撑构件的平衡力所做的功与作用在所述可移动结构上的重力所做的功基本上相等但方向相反。21.如权利要求19或20所述的坐标定位机器,其中,由所述驱动布置引起的所述可移动结构的水平移动被所述联动装置转换成所述至少一个支撑构件的至多竖直移动,从而导致施加到至少一个支撑构件上的一个或多个力基本上不做净功。22.如权利要求19、20或21所述的坐标定位机器,包括第一支撑构件和第二支撑构件,每个支撑构件被布置成沿着与重力基本上对齐的轨道可滑动地移动,其中,所述可移动结构在垂直于所述轨道或每个轨道的方向上的移动被所述联动装置转化成所述第二支撑构件沿着其轨道的移动,而所述第一支撑构件沿着其轨道基本上没有移动;其中,所述可移动结构在平行于所述轨道或每个轨道的方向上的移动被所述联动装置转化成至少所述第一支撑构件沿着其轨道在相同方向上的相同量的运动;并且可选地,其中,所述平衡力被施加到所述第一支撑构件上而不是所述第二支撑构件上。23.如权利要求19至22中任一项所述的坐标定位机器,其中,所述力产生器在与重力基本上相反的方向上将力f
i
施加到每个支撑构件i上,其中,∑
i
f
i
~mg,而所述联动装置将所
述可移动结构中的变化dx、dy、dz转化或转换成每个支撑构件i中的变化dx
i
、dy
i
、dz
i
,使得∑
i
f
i
dz
i
~mg.dz、dx
i
~0并且dy
i
~0,其中,m是所述可移动结构的质量,g是重力加速度,并且i是大于或等于1的整数,并且其中,f
i
中至少一个可以是零。24.如任一前述权利要求所述的坐标定位机器,其中,所述平衡轴线包括至少一条旋转平衡轴线。25.如权利要求24在从属于权利要求7时所述的坐标定位机器,其中,所述力产生器布置在串联的所述平衡轴线中的所述第一旋转平衡轴线的后面或距所述第一旋转平衡轴线预定水平距离处。26.如权利要求25所述的坐标定位机器,其中,所述预定水平距离是基本上恒定的,和/或其中,所述力产生器靠近所述第一旋转平衡轴线布置,例如其中所述预定水平距离小于所述第一旋转平衡轴线与所述可移动结构之间的水平距离的50%。27.如任一前述权利要求所述的坐标定位机器,其中,所述平衡轴线和所述力产生器相互被布置成使得所述可移动结构在垂直于重力的方向上的移动,在除了由于所述力产生器围绕至多一条旋转平衡轴线的旋转之外,基本上不导致所述力产生器的净移动。28.如权利要求27在从属于权利要求7时所述的坐标定位机器,其中,所述至多一条旋转平衡轴线是串联的所述平衡轴线中的所述第一旋转平衡轴线或唯一的旋转平衡轴线。29.如任一前述权利要求所述的坐标定位机器,其中,所述平衡轴线与所述驱动轴线分离,和/或其中,每条平衡轴线与所述驱动轴线中的每条驱动轴线分离和/或与其独立和/或不同。30.如任一前述权利要求所述的坐标定位机器,其中,所述平衡力所施加到的所述平衡轴线或每条平衡轴线具有相对于重力基本上恒定的取向,例如在线性平衡轴线的情况下与重力基本上对齐,或者在旋转平衡轴线的情况下与重力基本上垂直。31.如任一前述权利要求所述的坐标定位机器,其中,所述平衡力是基本上恒定的平衡力。32.如任一前述权利要求所述的坐标定位机器,其中,所述力产生器包括配重,所述配重在联接到其上的细绳或绳索或缆绳或缆线或类似物中产生张力。33.如任一前述权利要求所述的坐标定位机器,其中,所述驱动轴线中的每条驱动轴线是线性驱动轴线,和/或其中,当所述可移动结构围绕所述工作容积移动时,所述驱动轴线中没有一条驱动轴线具有或保持相对于重力基本上恒定的取向。34.如任一前述权利要求所述的坐标定位机器,其中,所述机器是非笛卡尔和/或平行运动学和/或六足坐标定位机器,并且其中,所述机器可以是坐标测量机器。35.一种平衡坐标定位机器的方法,所述坐标定位机器具有多条驱动轴线,其中的每一条是旋转驱动轴线或线性驱动轴线,用于将可移动结构定位在所述机器的工作容积内,所述方法包括提供与所述驱动轴线中的任一条分开的线性平衡轴线、以及经由所述线性平衡轴线使所述可移动结构平衡。
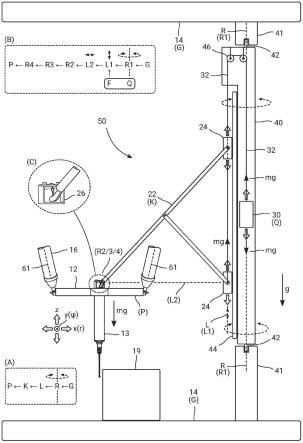
技术总结
一种坐标定位机器包括:多条驱动轴线(61),其中的每一条是旋转驱动轴线或线性驱动轴线,用于将平台(12)定位在机器的工作容积内;以及线性平衡轴线(L),该线性平衡轴线与驱动轴线(61)中的任一条分开,用于使平台(12)平衡。利用这样的平衡布置(50),单独的线性平衡轴线(L)可以基本上不随驱动轴线(61)的取向变化而变化,并且因此可以例如通过简单的配重(30)被平衡,从而在机器的整个工作容积中为平台(12)提供理想的或接近理想的平衡。还披露了一种平衡布置(50),在该平衡布置中,平衡轴线(R1,L1,L2)和力产生器(30)相互被布置成使得平台(12)的水平移动基本上不导致力产生器(30)的净移动和/或基本上不导致对力产生器做功。还披露了一种平衡布置(50),在该平衡布置中,一系列平衡轴线(R1,L1,L2)具有至少一条旋转平衡轴线(R1),并且其中,力产生器(30)布置在该系列中的第一旋转平衡轴线(R1)的后面或距该第一旋转平衡轴线预定水平距离处。还披露了一种具有一系列平衡轴线(R1,L1,L2)的平衡布置(50),在力产生器(30)与地面(14)之间具有至多一条旋转平衡轴线(R1)。至多一条旋转平衡轴线(R1)。至多一条旋转平衡轴线(R1)。
技术研发人员:戴维
受保护的技术使用者:瑞尼斯豪公司
技术研发日:2020.10.15
技术公布日:2022/6/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。