技术特征:
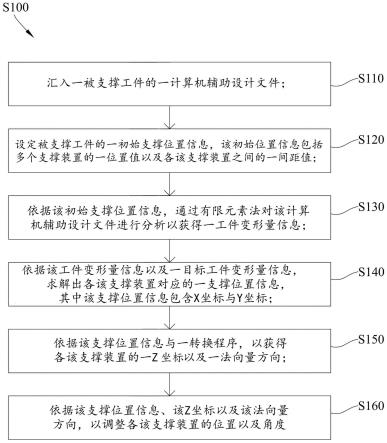
1.一种调整支撑工件方法,包括以下步骤:设定被支撑工件的初始支撑位置信息,其中该初始支撑位置信息包括多个支撑装置的位置值以及各该支撑装置之间的间距值;依据该初始支撑位置信息,通过有限元素法对该被支撑工件的计算机辅助设计文件进行分析以获得工件变形量信息;依据该工件变形量信息以及目标工件变形量信息,求解出各该支撑装置对应的支撑位置信息,其中该支撑位置信息包括x坐标与y坐标;依据该支撑位置信息与转换程序,以获得各该支撑装置的z坐标以及法向量方向;以及依据该支撑位置信息、该z坐标以及该法向量方向,以调整各该支撑装置的位置以及角度。2.如权利要求1所述的调整支撑工件方法,其中所述设定被支撑工件的该初始支撑位置信息的步骤之前,还包括以下步骤:提供可调式支撑模块,其中该可调式支撑模块包括多个在x轴向移动的支撑组件以及在y轴向移动的各该支撑装置,各该支撑装置设置于对应的该支撑组件之内。3.如权利要求2所述的调整支撑工件方法,其中该初始支撑位置信息还包括各该支撑组件的位置值以及各该支撑组件之间的间距值。4.如权利要求2所述的调整支撑工件方法,还包括以下步骤:设定各该支撑组件及各该支撑装置在该被支撑工件的尺寸范围内移动。5.如权利要求2所述的调整支撑工件方法,其中所述通过有限元素法对该被支撑工件的该计算机辅助设计文件进行分析以获得该工件变形量信息的步骤,还包括以下步骤:定义各该支撑装置与各该支撑组件的初始位置为固定间距,并作为该初始支撑位置信息;依据该初始支撑位置信息对该被支撑工件的支撑分布点进行初始点位设定,以获得该被支撑工件的一组支撑点位;以及依据该组支撑点位,通过该有限元素法分析该被支撑工件的变形量。6.如权利要求2所述的调整支撑工件方法,其中该支撑位置信息包括该多个支撑组件的支撑位置信息,所述求解出各该支撑装置对应的该支撑位置信息的步骤,还包括以下步骤:定义求解变数为各该支撑组件与各该支撑装置的位置;依据目标函数,判断每次迭代时该工件变形量信息是否小于一收敛百分比;若是,判断该工件变形量信息为该支撑位置信息;以及若否,迭代更新该求解变数继续判断该工件变形量信息是否小于该收敛百分比。7.如权利要求6所述的调整支撑工件方法,其中所述判断每次迭代时该工件变形量信息是否小于该收敛百分比的步骤,还包括以下步骤:判断该工件变形量信息是否在需求值之内;若是,移动部分的该支撑装置在该被支撑工件的尺寸范围之外;若否,继续判断该工件变形量信息是否小于该收敛百分比。8.一种可调式支撑工件系统,其特征在于,包括:可调式支撑模块,包括多个支撑装置,各该支撑装置具有初始支撑位置信息,其中该初
始支撑位置信息包括多个支撑装置的位置值以及各该支撑装置之间的间距值;分析模块,接收被支撑工件的计算机辅助设计文件,并通过有限元素法对该计算机辅助设计文件进行分析以获得工件变形量信息;坐标处理模块,依据该工件变形量信息以及目标工件变形量信息,求解出各该支撑装置对应的支撑位置信息,其中该支撑位置信息包括x坐标与y坐标,进而再依据该支撑位置信息与转换程序,以获得各该支撑装置的z坐标以及法向量方向;以及控制模块,依据该支撑位置信息、该z坐标以及该法向量方向,以调整各该支撑装置的位置以及角度。9.如权利要求8所述的可调式支撑工件系统,其中该可调式支撑模块包括多个在x轴向移动的支撑组件,各该支撑装置在y轴向移动且设置于对应的该支撑组件之内。10.如权利要求9所述的可调式支撑工件系统,其中该初始支撑位置信息包括各该支撑组件的位置值以及各该支撑组件之间的间距值。11.如权利要求9所述的可调式支撑工件系统,其中该支撑位置信息包括各该支撑组件的支撑位置信息。
技术总结
本发明公开一种调整支撑工件方法及可调式支撑工件系统,其中调整支撑工件方法包括以下步骤:设定被支撑工件的初始支撑位置信息;依据初始支撑位置信息,通过有限元素法对被支撑工件的计算机辅助设计文件进行分析以获得工件变形量信息;依据工件变形量信息以及目标工件变形量信息,求解出各支撑装置对应的支撑位置信息;依据支撑位置信息与转换程序,以获得各支撑装置的Z坐标以及法向量方向;依据支撑位置信息、Z坐标以及法向量方向,以调整各支撑装置的位置以及角度。撑装置的位置以及角度。撑装置的位置以及角度。
技术研发人员:陈俊廷 廖建智 陈佩吟 王仁杰 赖俞升
受保护的技术使用者:财团法人工业技术研究院
技术研发日:2020.12.21
技术公布日:2022/6/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。