技术特征:
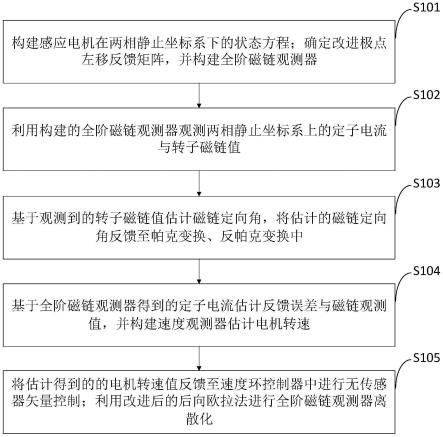
1.一种无速度传感器感应电机高速域的稳定控制方法,其特征在于,所述无速度传感器感应电机高速域的稳定控制方法包括:利用采用改进极点左移反馈矩阵的全阶磁链观测器估计电流估计反馈误差与磁链观测值;利用速度观测器估计电机转速,将估计的电机转速值反馈至速度环控制器中进行无传感器矢量控制;利用改进后的后向欧拉法进行全阶磁链观测器离散化。2.如权利要求1所述无速度传感器感应电机高速域的稳定控制方法,其特征在于,所述无速度传感器感应电机高速域的稳定控制方法包括以下步骤:步骤一,构建感应电机在两相静止坐标系下的状态方程;确定改进极点左移反馈矩阵,并构建全阶磁链观测器;步骤二,利用构建的全阶磁链观测器观测两相静止坐标系上的定子电流与转子磁链值;步骤三,基于观测到的转子磁链值估计磁链定向角,将估计的磁链定向角反馈至帕克变换、反帕克变换中;步骤四,基于全阶磁链观测器得到的定子电流估计反馈误差与磁链观测值,并构建速度观测器估计电机转速;步骤五,将估计得到的的电机转速值反馈至速度环控制器中进行无传感器矢量控制;利用改进后的后向欧拉法进行全阶磁链观测器离散化。3.如权利要求2所述无速度传感器感应电机高速域的稳定控制方法,其特征在于,所述感应电机在两相静止坐标系下的状态方程如下:其中,l
σ
=σl
s
l
r
/l
m i
s
,ψ
r u
s
分别表示定子电流、转子磁链、定子电压;r
s r
r
分别表示定子电阻和转子电阻;l
s l
r l
m
分别表示定子电感、转子电感、互感;ω
r
表示转子角频率;τ
r
表示转子时间常数;σ表示漏感系数。4.如权利要求2所述无速度传感器感应电机高速域的稳定控制方法,其特征在于,所述反馈矩阵如下:
5.如权利要求2所述无速度传感器感应电机高速域的稳定控制方法,其特征在于,所述全阶磁链观测器如下:6.如权利要求2所述无速度传感器感应电机高速域的稳定控制方法,其特征在于,所述速度观测器如下:7.如权利要求2所述无速度传感器感应电机高速域的稳定控制方法,其特征在于,所述利用改进后的后向欧拉法进行全阶磁链观测器离散化包括:利用改进后的后向欧拉法进行全阶磁链观测器离散化,得到基于改进后的后向欧拉法的全阶磁链观测器特征模型;所述基于改进后的后向欧拉法的全阶磁链观测器特征模型如下:8.一种计算机设备,其特征在于,所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行如权利要求1-7任意一项所述无速度传感器感应电机高速域的稳定控制方法如下步骤:步骤一,构建感应电机在两相静止坐标系下的状态方程;确定改进极点左移反馈矩阵,并构建全阶磁链观测器;步骤二,利用构建的全阶磁链观测器观测两相静止坐标系上的定子电流与转子磁链值;步骤三,基于观测到的转子磁链值估计磁链定向角,将估计的磁链定向角反馈至帕克变换、反帕克变换中;步骤四,基于全阶磁链观测器得到的定子电流估计反馈误差与磁链观测值,并构建速度观测器估计电机转速;步骤五,将估计得到的的电机转速值反馈至速度环控制器中进行无传感器矢量控制。9.一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行如权利要求1-7任意一项所述无速度传感器感应电机高速域的稳定控制方法如下步骤:步骤一,构建感应电机在两相静止坐标系下的状态方程;确定改进极点左移反馈矩阵,并构建全阶磁链观测器;步骤二,利用构建的全阶磁链观测器观测两相静止坐标系上的定子电流与转子磁链值;步骤三,基于观测到的转子磁链值估计磁链定向角,将估计的磁链定向角反馈至帕克
变换、反帕克变换中;步骤四,基于全阶磁链观测器得到的定子电流估计反馈误差与磁链观测值,并构建速度观测器估计电机转速;步骤五,将估计得到的的电机转速值反馈至速度环控制器中进行无传感器矢量控制。10.一种信息数据处理终端,其特征在于,所述信息数据处理终端用于执行如权利要求1-7任意一项所述无速度传感器感应电机高速域的稳定控制方法。
技术总结
本发明属于交流伺服系统控制技术领域,公开了一种无速度传感器感应电机高速域的稳定控制方法,包括:利用采用改进极点左移反馈矩阵的全阶磁链观测器估计电流估计反馈误差与磁链观测值;利用速度观测器估计电机转速,将估计的电机转速值反馈至速度环控制器中进行无传感器矢量控制;利用改进后的后向欧拉法进行全阶磁链观测器离散化。本发明提出了改进型的极点左移反馈矩阵,增大了观测器阻尼比并且计算量较小,提升了磁链观测与无传感矢量控制的性能;提出了一种改进型的后向欧拉法,克服了全阶磁链观测器离散化后不能同时兼顾稳定性和计算复杂度的问题。性和计算复杂度的问题。性和计算复杂度的问题。
技术研发人员:宋宝 赵琨 周向东 唐小琦 刘楷文 张泽之 吴玉泉 高天赐 林志鹏
受保护的技术使用者:华中科技大学
技术研发日:2022.04.01
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。