技术特征:
1.一种基于图自注意力网络的柴油机连续工况解耦识别方法,其特征在于,包括以下步骤:第一步:建立样本数据集1.1按工况分布收集柴油机连续工况变化实验数据,整理得到总样本集d:d={f1,f2,
…
,f
t
,
…
,f
t
}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)(1)其中,d为总样本集,f
t
代表第t类工况参数样本集,t为工况类别数量,代表第t类工况参数下的第i个样本,n代表第t类工况参数下的样本数量,代表第t类工况参数下的第i个样本的第j个序列点,代表第t类工况参数下的第i个样本的第k个序列点,k为每个样本包含的序列点数,数值上等于机械运行一个完整的工作周期传感器所采集的序列点数;1.2将经过滤波降噪处理后的信号进行归一化处理,记x泛指一个样本,即对每一个样本x按照如下方式更新:f(x):x
→
x
new
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)其中,x
new
为归一化后的样本,x
new
∈[-1,1],x
min
为样本x序列中最小值,x
max
为样本x序列中最大值;1.3按样本类别将总样本集d划分训练集和测试集,比例为3:1,且训练集样本对应的工况类别与测试集工况类别不同,例如共24种工况类别,将其中18种工况的样本划分为训练集,其余6种工况的样本划分为测试集;第二步:设计样本工况标签由于工况参数量纲不同,会导致网络不同通道输出误差的精度不同,用两个独立参数表示样本工况标签:γ=[α,β],分别用额定转速和额定负载进行归一化处理,计算过程如下:下:其中,v为信号当前转速,v
idling
为柴油机怠速,v
rated
为柴油机额定转速;l为信号当前负载,l
min
为柴油机的最小负载,一般l
min
=0,l
rated
为柴油机额定负载,l
rated
计算过程如下:其中,p
rated
为柴油机额定功率;第三步:建立自注意力机制网络模型
不同角域信号片段的隐特征之间存在内在关联,对同一分类任务,隐特征包含了不同的分类贡献度,对识别结果有不同的影响;采用自注意力机制,挖掘各时间区间信号中的关键信息;在输入层将样本x分成m段维度为d的角域信号片段,更新过程如下:x=[x1,x2,
…
,x
i
,
…
,x
m
]
t
∈r
m
×
d
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)其中,x
i
为样本x的第i个片段;计算queries向量和keys向量,如下:计算queries向量和keys向量,如下:其中,w
q
和是线性变换矩阵,其维度为d
×
d
k
,queries向量和keys向量的维度为m
×
d
k
,这里queries向量代表了当前信号段的特征表达,keys向量代表了输入中其他信号片段的特征表达,计算queries向量和所有keys向量之间的相似度,然后施加一个激活函数,得到信号片段的自注意关系矩阵att:其中,softmax(
·
)为softmax激活函数,d
k
为queries向量和keys向量的维度;第四步:建立图卷积网络模型建立图数据g,建立流程如下:g=(x,att)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)其中,以角域信号片段x为节点,共m个节点,以自注意力系数att为边,图中节点通过图卷积算法聚合邻居节点的特征,生成新的节点表示,图卷积算法更新过程如下:h=σ(l
sym
xw
h
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)其中,h为图卷积层输出矩阵,σ(
·
)为非线性激活函数,l
sym
为symmetric normalized laplacian矩阵,w
h
为可训练的权重矩阵,其维度为d
×
d,为增加自环后的邻接矩阵,i是单位矩阵,dig=diag(d(v1),d(v2),
…
,d(v
n
))∈r
n
×
n
是g的度矩阵,其中d(v1)=∑
j∈v
a
ij
是节点v1的度,是的度矩阵,特征矩阵x通过左乘邻接矩阵完成邻居节点之间传播和接收特征的过程,然后右乘一个可训练的权重矩阵w
h
,完成线性变换,最后经过非线性激活函数激活,完成特征聚合;最后,将各个信号片段按原来的顺序排列组合到一起,得到信号增强矩阵d
′
:x
′
=reshape(h)∈r1×
k
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(16)d
′
={f
′1,f
′2,
…
,f
′
t
}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(18)其中,reshape()为矩阵维度变换函数,x
′
为一个样本维度变换后的输出向量,f
′
t
为信号增强后的第t类工况样本数据集,其中为信号增强后第t类工况下的第1个样本,n代
表第t类工况参数下的样本数量,k代表每个样本包含的序列点数,数值上等于机械运行一个完整的工作周期传感器所采集的序列点数,d
′
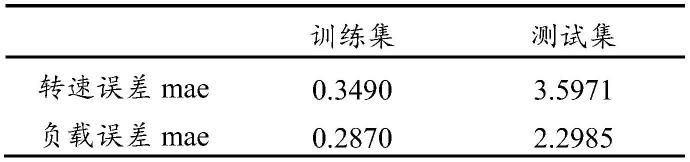
为信号增强后的总样本数据集,t为工况类别数量;第五步:建立工况解耦空间定义网络模型分类器为工况解耦空间,由一层全连接层构成,其节点数在数值上等于2,即分别为转速和负载通道,其激活函数选取relu;工况解耦空间把工况标签量化,以转速和负载通道为基准轴,以具体参数值为刻度,将样本数据降维映射到工况解耦空间,可视化样本工况识别数值,完成转速和负载参数的解耦和连续识别;第六步:建立最终工况解耦识别模型;最终识别模型建立为双通道模型,每个通道由自注意力网络层、图卷积网络层和工况解耦空间分类器构成;最终模型输入为经上述步骤1.1、步骤1.2和步骤1.3数据预处理后的样本,输出为上述第二步中样本的标签,模型目标为预测值的平均绝对误差mae最小,损失函数loss选择mae,优化方式选择adam;最终训练工况识别模型,达到mae梯度下降为0后停止训练,并保存模型;第七步:工况参数解耦识别;当机器在后续工作过程中,任意提取一个工作周期的信号作为一个样本,经步骤1.2中的归一化后,输入至第六步保存的模型,在工况解耦空间中自动显示出样本的转速和负载参数值,且该数值为连续数值。
技术总结
一种基于图自注意力网络的柴油机连续工况解耦识别方法属于设备状态监测与诊断技术领域。首先,设计实验工况和工况标签,并根据工况分布划分训练集和测试集。其次,建立自注意力网络层,计算角域信号片段之间的相似性,继次,建立图卷积网络层,聚合邻居节点信息,接着,建立工况解耦空间,将信号特征降维映射到工况解耦空间。最终形成、训练、保存一个巧妙结合自注意力机制和图卷积算法的工况识别网络模型。当一个新样本输入至保存的工况识别模型后,会给出当前信号具体的转速和负载值,实现工况多参数的解耦和精确识别。工况多参数的解耦和精确识别。
技术研发人员:茆志伟 黄安征 李辉 赵南洋 张进杰 江志农
受保护的技术使用者:北京化工大学
技术研发日:2022.02.17
技术公布日:2022/6/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。