技术特征:
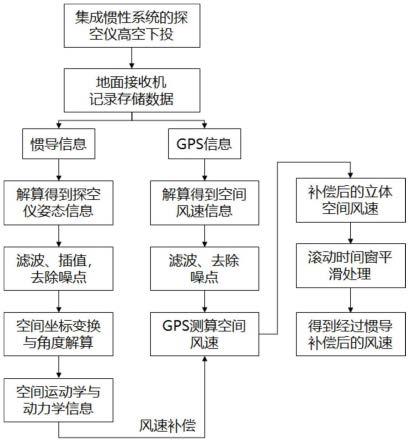
1.一种基于惯性系统的探空仪风速测量误差补偿方法,风速测量过程中的下投结构包括伞、绳及探空仪,探空仪通过绳与伞底相连,伞为探空仪提供浮空时间,绳在下投过程中保持拉紧状态,其特征在于,所述补偿方法包括以下步骤:s1:在探空仪上集成惯性系统,进行高空下投探测,获取立体空间气象数据,地面接收机实时记录并存储探空仪原位探测数据及三轴惯导信息;s2:利用接收到的探空仪gps/北斗信息,计算探空仪探测到的立体空间风速信息;s3:利用接收到的探空仪三轴惯导信息,计算探空仪下落过程中的姿态信息;s4:将步骤s3的结果通过空间坐标系变换与角度解算,获取探空仪的实时相对空间运动姿态信息;s5:通过步骤s4得到的探空仪的相对空间运动姿态信息,计算探空仪因自身姿态变化导致的风速测量误差,代入步骤s2解算的立体空间风速信息中,完成风速补偿;s6:对经过步骤s5补偿后的风速数据进行滚动时间窗平滑处理,进一步消除环境噪声的影响。2.根据权利要求1所述的补偿方法,其特征在于,所述步骤s3中的三轴惯导信息包括三轴加速度、三轴角速度以及三轴角度信息,保留角度范围在(-180
°
,180
°
)的三轴角度信息,通过三次样条插值对三轴角度原始数据插值,再对位移进行差分求解得到运动速度;惯性系统使用欧拉角表示姿态时的坐标系旋转顺序为,先绕z轴旋转,再绕y轴旋转,最后绕x轴旋转,因此,绕y轴旋转的角度范围只有
±
90
°
;以探空仪的质心为原点o、以从探空仪的质心指向绳与探空仪连接点方向为ox
b
轴、以从探空仪的质心指向探空仪横向中心线方向为oz
b
轴、以与ox
b
轴和oz
b
轴垂直方向为oy
b
轴,建立与探空仪固连的坐标系ox
b
y
b
z
b
即b系;以伞底为原点o、以从伞底指向地理坐标系东向为oy
n
轴、以从伞底指向地理坐标系北向为oz
n
轴、以从伞底指向地理坐标系天向为ox
n
轴,建立与伞底固连的坐标系ox
n
y
n
z
n
即n系;在探空仪静止即探空仪与伞不发生相对摆动时,b系能够由n系沿绳平移得到;以下投时刻伞底为原点o、ox
i
轴指向天向、oy
i
轴指向东向、oz
i
轴指向北向,建立空间直角坐标系ox
i
y
i
z
i
即i系;定义绳与ox
i
轴夹角为θ
x
,绳与oy
i
轴夹角为θ
y
;对原始数据的三次样条插值方法为:s3-1:针对绕ox
b
轴旋转角度θ,原始数据中有n 1个数据节点:(θ0,t0),(θ1,t1),
…
,(θ
i
,t
i
),
…
,(θ
n
,t
n
),i=0,1,...,n,其中,t
i
为当前数据记录时间,θ
i
为t
i
时刻对应的ox
b
轴旋转角度值,在三次样条插值过程中,满足:在每个分段区间上[t
i
,t
i 1
]上,f(t)=f
i
(t)都是一个三次方程;插值条件f(t
i
)=θ
i
;曲线光滑,即f(t)、f
′
(t)、f
″
(t)连续;令三次方程各项系数为a
i
、b
i
、c
i
、d
i
,则有:其中,f(t)为经过三次样条插值后的定义域在(t0,t
n
)上表示t时刻的角度θ=f(t)的函
数,f
i
(t)为分段区间[t
i
,t
i 1
]上表示对应时刻角度的函数,f
′
i
(t)、f
″
i
(t)分别为f
i
(t)的一阶、二阶导函数;s3-2:得到关于未知数的线性方程组:s3-2-1:由f
i
(t
i
)=a
i
b
i
(t
i-t
i
) c
i
(t
i-t
i
)2 d
i
(t
i-t
i
)3=θ
i
,得到a
i
=θ
i
,其中,a
i
,b
i
,c
i
,d
i
均为系数;s3-2-2:令h
i
=t
i 1-t
i
,由边界连续条件f
i
(t
i 1
)=θ
i 1
推出:由边界导数连续条件f
′
i
(t
i 1
)=f
′
iv1
(t
i 1
),得到:由f
″
i
(t
i 1
)=f
″
i 1
(t
i 1
),得到:令m
i
=f
″
i
(t
i
)=2c
i
,则式(2)写为m
i
6h
i
d
i
=m
i 1
,则:h
i
,m
i
分别为中间变量;s3-2-3:将a
i
=t
i
,代入式(1)中,得到:将a
i
,b
i
,c
i
,d
i
代入式(2)中,得到:s3-2-4:将式(5)拓展至所有时间点,得到以m0,m1,m2,...,m
n
为未知变量的线性方程组,在插值过程中选择自然边界条件,即m0=0,m
n
=0,则方程组为:
至此,在每个分段区间[t
i
,t
i 1
]上,通过对方程组的求解能够确定a
i
,b
i
,c
i
,d
i
;s3-3:设置新的采样时间间隔则经过插值的角度θ为:θ
i j
=f
i
(t
i
jδt
i
),j=1,2,...,n-1通过控制n值即得到相应的时间精度信息;s3-4:对于绕oy
b
轴的旋转角度γ、绕oz
b
轴的旋转角度ψ数据,通过相同的三次样条插值方法进行数据插值,插值前的数据共有n 1个,经过插值后有nn 1个。3.根据权利要求2所述的补偿方法,其特征在于,所述步骤s4中,在时刻t
i
,探空仪所在坐标系ox
b
y
b
z
b
相对于伞所在的坐标系ox
n
y
n
z
n
在仅受张紧的绳的限制下发生位移与角度变换关系,通过姿态角解算探空仪相对于伞的运动速度s4-1:按照z-y-x坐标轴旋转顺序,从n系到b系的坐标变换矩阵为:其中,c
θ
是绕ox
n
旋转θ的旋转矩阵、c
γ
是绕oy
n
旋转γ的旋转矩阵、c
ψ
是绕oz
n
旋转ψ的旋转矩阵,分别表示为:
s4-2:在只考虑b系相对于n系的旋转关系而不考虑位移关系时,ox
n
=[1 0 0]
t
在b系下的表示表示为:θ
x
表示为与ox
b
之间的夹角:s4-3:在只考虑考虑b系相对于n系的旋转关系而不考虑位移关系时,ox
b
=[1 0 0]
t
在b系下的表示表示为:向量oh即在oy
n
z
n
平面上的投影,n系下表示为:oh
n
=[0
ꢀ‑
cosγcosψ sinγ]
t
根据几何关系,θ
y
表示为oy
n
与oh之间的夹角:s4-4:设绳长为l,则t
k
时刻,k=0,1,...,nn,经过角度解算得到θ
x
(k)与θ
y
(k),则探空仪相对于伞底的位置为:通过前向差分,得到t
k
时刻探空仪相对于伞的东向速度北向速度北向速度其中,为t
k
时刻由经过处理的三轴角速度计算得到的东向速度,为t
k
由经过处理的三轴角速度计算得到的北向速度。4.根据权利要求3所述的补偿方法,其特征在于,所述步骤s5中,探空仪的gps/北斗信息,包括探空仪相对于地理坐标系的北向速度探空仪相对于地理坐标系东向速度由探空仪的gps/北斗信息得到的风速为:由于探空仪和伞之间依靠绳连接,gps测算得到的风速实际上是探空仪相对于伞的运
动与风速的叠加,因此将gps测算得到的风速分解为:其中,为惯性系统测算出探空仪相对于伞即n系的速度,为在伞下点坐标系即i系下的风速;t
i
时刻对应的速度与一定能够找到对应时刻的速度与则此时的风速为:对v
w
进行处理,得到最终经过补偿后的风速v
wind
:其中,floor(
·
)为向下取整。
技术总结
本发明公开了一种基于惯性系统的探空仪风速测量误差补偿方法,通过在传统探空仪系统上集成惯性组件,获取探空仪运动的真实姿态信息,进而补偿因探空仪在恶劣环境下自身运动所导致的风速测量误差。利用惯性系统的实测数据进行误差补偿,可根据探空仪每次测试的实际情况逐点高精度补偿,提高风速探测精度。提高风速探测精度。提高风速探测精度。
技术研发人员:郑德智 李大鹏 陈傲北 王帅
受保护的技术使用者:北京航空航天大学
技术研发日:2022.03.29
技术公布日:2022/6/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。