技术特征:
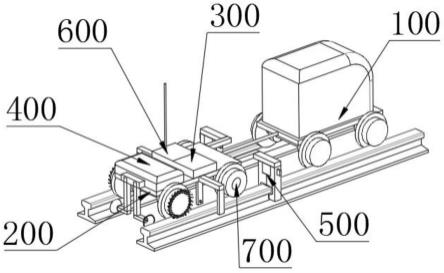
1.基于深度学习网络的钢轨表面缺陷检测用信息收集无人机,其特征在于:包括,电动牵引车(100),所述电动牵引车(100)包括电动车底盘和驱动电源;信息收集拖车(200),所述信息收集拖车(200)包括拖车底板(201)、两个拖车前轮(202)和两个拖车后轮(203),两个所述拖车前轮(202)转动连接于拖车底板(201)的底部前侧,两个所述拖车后轮(203)转动连接于拖车底板(201)的底部后侧,所述拖车底板(201)的前侧中心与电动牵引车(100)的后侧中心通过钢索连接,所述拖车底板(201)的后侧设置有声波检测机构(400),且拖车底板(201)的前侧设置有制动机构(500);图像信息采集机构(300),所述图像信息采集机构(300)包括图像数据接收器(301)、两侧摄像头安装架(302)和多个高速摄像头(303),两个所述摄像头安装架(302)对应钢轨位置设置于拖车底板(201)的两侧中部,且摄像头安装架(302)呈倒置的u形结构,多个所述高速摄像头(303)分别设置于摄像头安装架(302)的u形结构内壁对应钢轨的两侧和顶部位置,多个所述高速摄像头(303)均与图像数据接收器(301)电性连接;数据传输机构(600),所述数据传输机构(600)设置于拖车底板(201)的上端中心,且图像数据接收器(301)与数据传输机构(600)电性连接;云端服务器(800),所述云端服务器(800)通过无线网络与数据传输机构(600)连接通信,所述云端服务器(800)上设置有数据处理模块(801)和深度学习模块(802)。2.根据权利要求1所述的基于深度学习网络的钢轨表面缺陷检测用信息收集无人机,其特征在于:所述声波检测机构(400)包括声波数据接收器(401)、两组敲击锤(402)和两个高灵敏度声音探听器(403),所述声波数据接收器(401)设置于拖车底板(201)的上端后侧,且声波数据接收器(401)与数据传输机构(600)电性连接,两组所述敲击锤(402)分别设置于两侧拖车后轮(203)的朝外一侧,所述高灵敏度声音探听器(403)通过安装于拖车底板(201)的后侧中心,且两个高灵敏度声音探听器(403)分别对应两侧钢轨设置。3.根据权利要求2所述的基于深度学习网络的钢轨表面缺陷检测用信息收集无人机,其特征在于:所述高灵敏度声音探听器(403)的外侧设置有集音罩(404),且集音罩(404)呈喇叭状,所述集音罩(404)的开口正向钢轨设置。4.根据权利要求3所述的基于深度学习网络的钢轨表面缺陷检测用信息收集无人机,其特征在于:每组的多个所述敲击锤(402)呈环形阵列设置,所述敲击锤(402)包括连接插杆(421)、弹性锤臂(422)和圆柱锤头(423),所述连接插杆(421)和圆柱锤头(423)分别设置于弹性锤臂(422)的两端,且连接插杆(421)插接固定于拖车后轮(203)的外侧,多个所述弹性锤臂(422)的外端逆着拖车后轮(203)的转动方向倾斜于拖车后轮(203)径向设置。5.根据权利要求1所述的基于深度学习网络的钢轨表面缺陷检测用信息收集无人机,其特征在于:所述制动机构(500)包括两对制动夹(501)和两个制动架(503),两个所述制动架(503)设置于拖车底板(201)的前侧朝向去,且制动架(503)的前端往外弯折设置于钢轨的正上方,两侧所述制动架(503)的底部均通过固定插销(504)销接固定有两个制动夹(501),两个所述制动夹(501)镜像对称设置于钢轨的两侧,且两侧制动夹(501)内侧设置有与钢轨形状相匹配的缺口,两侧所述制动夹(501)内侧缺口中均设置有制动摩擦块(502)。6.根据权利要求5所述的基于深度学习网络的钢轨表面缺陷检测用信息收集无人机,其特征在于:所述制动摩擦块(502)的前侧还设置有一圈清理刷(505),且清理刷(505)为猪鬃材质。
7.根据权利要求1所述的基于深度学习网络的钢轨表面缺陷检测用信息收集无人机,其特征在于:所述拖车底板(201)和拖车后轮(203)均为外侧包裹有橡胶摩擦套的钢制轨道轮,且拖车后轮(203)上设置有轮速传感器(700),所述轮速传感器(700)与数据传输机构(600)电性连接。8.根据权利要求1所述的基于深度学习网络的钢轨表面缺陷检测用信息收集无人机,其特征在于:所述数据传输机构(600)内部设置有数据存储器(601)和无线通讯模块(602),所述数据存储器(601)用于存储收集的信息数据,所述无线通讯模块(602)用于通过无线网络将接收的数据传输给云端服务器(800)。9.根据权利要求8所述的基于深度学习网络的钢轨表面缺陷检测用信息收集无人机,其特征在于:所述数据传输机构(600)上设置有辅助天线(603),所述辅助天线(603)为伸缩式天线。10.根据权利要求1所述的基于深度学习网络的钢轨表面缺陷检测用信息收集无人机,其特征在于:所述深度学习模块(802)包括钢轨表面缺陷图像数据库和检验信息数据库,根据人工对不同钢轨表面图像与钢轨缺陷进行关联后填充入钢轨表面缺陷图像数据库,通过提高钢轨表面缺陷图像数据库中的钢轨表面缺陷图像数量,提高表面缺陷检测的准确性,声波检测机构(400)检测的声波信息也能够通过数据处理模块(801)判断钢轨的内部损伤种类,并且轮速传感器(700)的定位联动,将其与对应位置的钢轨表面图像进行关联,能够提高钢轨表面图像信息与钢轨内部损伤的关联度,继而通过深度学习模块(802)的深度学习实现对远程对钢轨内部损伤信息的采集判断。
技术总结
本发明公开了一种基于深度学习网络的钢轨表面缺陷检测用信息收集无人机,属于钢轨表面检测技术领域,包括电动牵引车、信息收集拖车、图像信息采集机构、数据传输机构和云端服务器,电动牵引车包括电动车底盘和驱动电源,通过电动牵引车牵引信息收集拖车沿着待检钢轨移动,辅助工作人员对钢轨进行检修,无需人工巡逻,大大降低了钢轨检测的工作强度,电动牵引车和信息收集拖车分离式的结构,能够隔离电动牵引车驱动机构的振动,使得图像信息采集机构对数据的采集更加稳定,并且便于电动牵引车和信息收集拖车损坏后能够独立更换,便于设备的维护,提高了设备的利用率。提高了设备的利用率。提高了设备的利用率。
技术研发人员:米曾真 丛超 居本祥 赵珊珊 陈韧
受保护的技术使用者:重庆理工大学
技术研发日:2022.04.02
技术公布日:2022/7/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。