技术特征:
1.一种基于边缘计算的车路协同车联网任务卸载与迁移方法,其特征在于由下述步骤组成:(1)建模目标车辆产生的任务按下式建模目标车辆产生的任务h(t):h(t)=(w(t),z(t))其中,w(t)为时隙t任务的数据量,z(t)为该任务执行所需要的cpu周期数,t∈{1,2,
…
,t},t是总时隙,t为有限的正整数;(2)确定卸载对象和卸载子任务数量卸载对象为路边单元r和路上的接收车辆j,r∈{1,2,
…
,r},r为路边单元的总数量,r为有限的正整数,j∈{1,2,
…
,v},v为接收车辆的总数量,v为有限的正整数,对目标车辆产生的任务分为大小相等、随机排列的子任务,路边单元r与路上的接收车辆j可以处理来自目标车辆卸载的子任务,每个时隙t,目标车辆选择路边单元r与接收车辆j其中一个作为卸载对象,卸载部分子任务,在目标车辆处理的子任务为本地子任务,卸载到路边单元r或接收车辆j处理的子任务为卸载子任务,根据当前目标车辆的位置、目标车辆产生的任务、当前目标车辆可用的计算资源,用深度强化学习中的深度q网络方法对目标车辆在每个时隙t产生的任务确定卸载对象α(t)和卸载子任务数量x(t),α(t)∈{0,1},0≤x(t)≤x,x是子任务总个数,x为有限的正整数;(3)确定卸载子任务的传输时延按下式确定时隙t卸载子任务的传输时延t
t
(t):t
t
(t)=(1-α(t))
×
t
r
(t) α(t)
×
t
j
(t)(t)pl
r
(d
r
(t))=128.1 37.6
×
lg(d
r
(t))(t))(t))(t))其中,b
r
为目标车辆到路边单元r的带宽,p
r
为目标车辆给路边单元r传输时的发送功率,pl
r
(d
r
(t))为目标车辆到路边单元r的路径损耗,单位为db,d
r
(t)表示时隙t目标车辆到
路边单元r的距离,单位为km,n为高斯噪声的功率,b
j
为目标车辆到接收车辆j的带宽,p
j
为目标车辆给接收车辆传输时的发送功率,pl
j
(d
i
(t))为目标车辆到接收车辆j的路径损耗,单位为db,d
j
(t)表示时隙t目标车辆到接收车辆j的距离,单位为km,h
v
为车辆的天线高度,f为载波频率,c为自由空间传播速度;(4)确定卸载子任务的计算时延按下式确定卸载子任务的计算时延按下式确定卸载子任务的计算时延其中,c
r
(t)和c
j
(t)分别为在时隙t时路边单元r和接收车辆j分配给目标车辆卸载子任务的计算资源;(5)确定本地子任务的计算时延按下式确定本地子任务的计算时延t
lp
(t):其中,c
l
为本地计算资源;(6)确定总处理时延按下式确定总处理时延t
c
(t):(7)迁移卸载子任务计算结果目标车辆已超出卸载对象的通信范围,进入到交付路边单元d,d∈{1,2,
…
,r}的通信范围,计算结果无法直接发送给目标车辆,触发任务结果迁移机制,卸载对象将计算结果交付给交付路边单元d;(8)返回卸载子任务计算结果子任务计算结果返回目标车辆,卸载完成。2.根据权利要求1所述的基于边缘计算的车路协同车联网任务卸载与迁移方法,其特征在于:所述的(2)步骤中,所述的用深度强化学习中的深度q网络方法确定每个时隙t的卸载对象α(t)和卸载子任务数量x(t)的方法为:1)按下式确定时隙t目标车辆产生的任务卸载成功或失败f(t):其中,f(t)为1表示卸载成功,f(t)为0表示卸载失败,t
max
表示任务的最大容忍延迟时间,t
max
∈[1,20],单位为毫秒,d
d
(t)表示时隙t目标车辆和交付路边单元d之间的距离,m(t)表示时隙t是否发生了结果迁移,m(t)为1表示结果迁移,m(t)为0表示结果未迁移,r
r
表示路边单元的通信半径,r
r
∈[50,150],单位为m;2)按下式选择每个时隙t的卸载对象α(t)和卸载子任务数量x(t)以最大化总收益:
其中,γ为卸载失败时的惩罚因子,γ取值为-8~-1,选择每个时隙t的卸载对象α(t)和卸载子任务数量x(t)时需要满足以下条件:α(t)={0,1}t
c
(t)≤t
max
其中,α(t)为0表示卸载到路边单元r,α(t)为1表示卸载到接收车辆j。3.根据权利要求1所述的基于边缘计算的车路协同车联网任务卸载与迁移方法,其特征在于:在(7)步骤中,所述的触发任务结果迁移机制为:对于每一个任务,结果迁移最多只能发生一次,按下式确定时隙t任务的结果迁移情况m(t):m(t)=((1-α(t))
×
m
r
(t) α(t)
×
m
j
(t))d
r
(t)=||(t t
c
(t))
×
v
l-loc
r
||d
j
(t)=||(t t
c
(t))
×
v
l-(t t
c
(t))
×
v||其中,m
r
(t)为1和m
j
(t)为1表示发生了结果迁移,m
r
(t)为0和m
j
(t)为0表示未发生结果迁移,r
r
为路边单元的通信半径,v
l
为匀速行驶的目标车辆的速度,loc
r
为卸载路边单元的位置,r
j
为接收车辆的通信半径,v
j
为匀速行驶的接收车辆j的速度。4.根据权利要求1所述的基于边缘计算的车路协同车联网任务卸载与迁移方法,其特征在于在(1)步骤中,所述的建模目标车辆产生的任务为:按下式建模目标车辆产生的任务h(t):h(t)=(w(t),z(t))其中,w(t)为时隙t任务的数据量,w(t)的取值为2~8,z(t)为该任务执行所需要的cpu周期数,t∈{1,2,
…
,t},t是总时隙,t∈[1000,4332]。5.根据权利要求1所述的基于边缘计算的车路协同车联网任务卸载与迁移方法,其特征在于在(2)步骤中,所述的确定卸载对象和卸载子任务数量为:卸载对象为路边单元r和路上的接收车辆j,r∈{1,2,
…
,r},r为路边单元的总数量,r∈[1,10],j∈{1,2,
…
,v},v为接收车辆的总数量,v∈[5,35],对目标车辆产生的任务分为大小相等、随机排列的子任务,路边单元r与路上的接收车辆j可以处理来自目标车辆卸载的子任务,每个时隙t,目标车辆选择路边单元r与接收车辆j其中一个作为卸载对象,卸载部分子任务,在目标车辆处理的子任务为本地子任务,卸载到路边单元r或接收车辆j处理的子任务为卸载子任务,根据当前目标车辆的位置、目标车辆产生的任务、当前目标车辆可用的计算资源,用深度强化学习中的深度q网络方法对目标车辆在每个时隙t产生的任务确定卸载对象α(t)和卸载子任务数量x(t),α(t)∈{0,1},0≤x(t)≤x,x是子任务总个数,x∈[1,10]。
技术总结
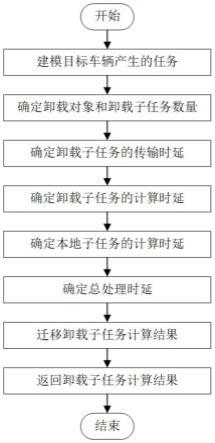
一种基于边缘计算的车路协同车联网任务卸载与迁移方法,由建模目标车辆产生的任务、确定卸载对象和卸载子任务数量、确定卸载子任务的传输时延、确定卸载子任务的计算时延、确定本地子任务的计算时延、确定总处理时延、迁移卸载子任务计算结果、返回卸载子任务计算结果步骤组成。本发明在确定卸载对象和卸载子任务数量时,考虑目标车辆位置、目标车辆产生的任务、目标车辆可用计算资源等三个重要属性的条件下,使用深度Q网络方法,以最大化总收益为目标车辆确定最合适的卸载对象和卸载子任务数量;在迁移子任务计算结果、目标车辆超出卸载对象的通信范围时,触发结果迁移机制,卸载对象将计算结果交付给交付路边单元,降低了任务卸载失败的概率。务卸载失败的概率。务卸载失败的概率。
技术研发人员:王亮 杜嘉蓉 王小明 林亚光 李梦阁
受保护的技术使用者:陕西师范大学
技术研发日:2022.04.15
技术公布日:2022/7/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。