技术特征:
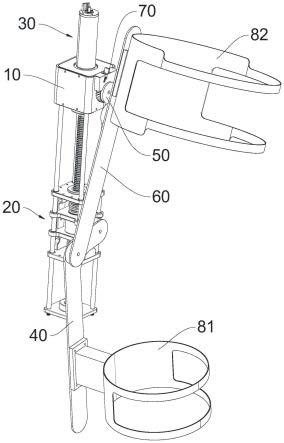
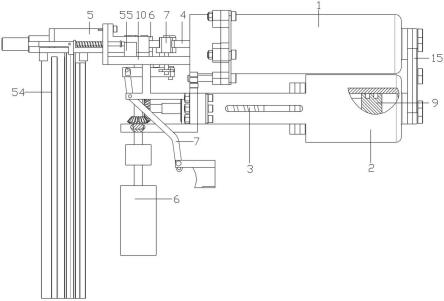
1.一种机器人关节结构,其特征在于:包括:安装架;弹性支架,其可移动地设置在所述安装架上;驱动机构,其用于驱动所述弹性支架做直线运动;第一支臂,其与所述弹性支架铰接,所述第一支臂与所述弹性支架铰接处的轴线记为第一轴线;调节臂,其与所述安装架铰接,所述调节臂与所述安装架铰接处的轴线记为第二轴线;第二支臂,其分别与所述第一支臂和所述调节臂铰接,所述第二支臂与所述第一支臂铰接处的轴线记为第三轴线,所述第三轴线可绕所述第一轴线旋转,所述第二支臂与所述调节臂铰接处的轴线记为第四轴线,所述第四轴线可绕所述第二轴线旋转,所述第三轴线与所述第二轴线之间的间距记为可调间距l,所述第二支臂与所述第一支臂具有初始夹角α;以及调节机构,其设置在所述安装架上,所述调节机构用于调节所述第四轴线的位置,以实现对所述可调间距l的长度,以及对所述初始夹角α的角度调节。2.根据权利要求1所述的机器人关节结构,其特征在于:所述调节机构包括棘轮和锁止组件,所述棘轮转动设置在所述安装架上,所述调节臂设置在所述棘轮上,所述棘轮的转动轴线与所述第二轴线重合,所述锁止组件设置在所述安装架上并用于限制所述棘轮的转向。3.根据权利要求2所述的机器人关节结构,其特征在于:所述安装架上设置有壳体,所述棘轮伸入所述壳体内;所述锁止组件包括第一棘爪、第一弹性件、第二棘爪和第二弹性件,所述第一棘爪和所述第二棘爪均转动设置在所述壳体内,并分别与所述棘轮啮合,所述第一棘爪与所述第二棘爪的止转方向相反;所述第一弹性件用于对所述第一棘爪施加阻止其脱离所述棘轮的作用力,所述第二弹性件用于对所述第二棘爪施加阻止其脱离所述棘轮的作用力。4.根据权利要求3所述的机器人关节结构,其特征在于:所述第一棘爪与所述第二棘爪对称布置在所述棘轮的两侧,所述第一棘爪上设置有第一间歇齿轮,所述第一间歇齿轮的转动轴线与所述第一棘爪的转动轴线重合;所述第二棘爪上设置有与所述第一间歇齿轮啮合的第二间歇齿轮,所述第二间歇齿轮的转动轴线与所述第二棘爪的转动轴线重合,所述第二棘爪上设置有拨块,所述拨块伸出所述壳体外。5.根据权利要求1-4任一项所述的机器人关节结构,其特征在于:所述第一支臂呈l型结构,所述第一支臂包括第一臂体和第二臂体,所述第一臂体与所述弹性支架铰接,所述第二支臂铰接于所述第一臂体与所述第二臂体连接的拐角处。6.根据权利要求5所述的机器人关节结构,其特征在于:所述第二臂体上设置有小腿穿戴件,所述第二支臂远离所述第一支臂的一端延伸形成有延伸臂,所述延伸臂设置有大腿穿戴件。7.根据权利要求1-4任一项所述的机器人关节结构,其特征在于:所述安装架上设置有导向架,所述导向架的一端设置有支撑座;
所述弹性支架包括第一滑板、第二滑板、第三滑板、第一弹簧、第二弹簧和多根连接杆,所述第一滑板、所述第二滑板和所述第三滑板均滑动配合在所述导向架上,所述第二滑板位于所述第一滑板和所述第三滑板之间,所述驱动机构用于驱动所述第二滑板做沿所述导向架滑动;所述第一弹簧的两端分别连接所述第一滑板和所述第二滑板,所述第二弹簧的两端分别连接所述第二滑板和所述第三滑板,每根所述连接杆分别连接所述第一滑板和所述第三滑板。8.根据权利要求7所述的机器人关节结构,其特征在于:所述驱动机构包括驱动电机、联轴器、减速器、丝杠和螺母;所述驱动电机、所述联轴器、所述减速器和所述丝杠依次传动连接,所述驱动电机、所述联轴器、所述减速器均设置在所述安装架内,所述丝杠设置在所述导向架内并与所述支撑座转动连接,所述螺母设置在所述第二滑板上并穿设在所述丝杠上。
技术总结
本发明提供了一种机器人关节结构,包括安装架、弹性支架、驱动机构、第一支臂、调节臂、第二支臂和调节机构。该机器人关节结构能够使刚性驱动转化为柔性驱动,从而减小了在使用该机器人关节结构过程中的风险,提高了人机交互的适应性。此外,通过设计调节机构,可适应性改变可调间距L的长度,以及初始夹角α的角度,这样一来,穿戴者根据自身习惯的站姿,以及自身膝盖伸直角度,就可适应性地调整第一支臂与第二支臂的初始夹角α,如此,使得该机器人关节机构能够适应不同穿戴人群的膝关节伸直度,并使其具有更广泛的适用范围。其具有更广泛的适用范围。其具有更广泛的适用范围。
技术研发人员:王家序 周聪 宋延奎 余泓宇 向果 贾航 郭娟
受保护的技术使用者:重庆科技学院 重庆大学
技术研发日:2022.04.22
技术公布日:2022/7/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。