技术特征:
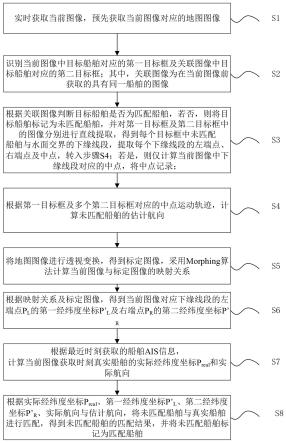
1.一种船舶信息匹配方法,其特征在于,包括:s1、实时获取当前图像,预先获取当前图像对应的地图图像;s2、识别所述当前图像中目标船舶对应的第一目标框及关联图像中目标船舶对应的第二目标框;其中,所述关联图像为在当前图像前获取的具有同一船舶的图像;s3、根据所述关联图像判断所述目标船舶是否为匹配船舶,若否,则将所述目标船舶标记为未匹配船舶,并对所述第一目标框及第二目标框中的图像分别进行直线提取,得到每个目标框中未匹配船舶与水面交界的下缘线段,提取每个下缘线段的左端点、右端点及中点;若是,则仅计算所述当前图像中下缘线段对应的中点,将中点记录;s4、根据第一目标框及多个第二目标框对应的中点运动轨迹,计算所述未匹配船舶的估计航向;s5、将所述地图图像进行透视变换,得到标定图像,采用morphing算法计算所述当前图像与所述标定图像的映射关系;s6、根据所述映射关系及所述标定图像,得到所述当前图像对应下缘线段的左端点的第一经纬度坐标及右端点的第二经纬度坐标;s7、根据最近时刻获取的船舶ais信息,计算当前图像获取时刻真实船舶的实际经纬度坐标和实际航向;s8、根据实际经纬度坐标、第一经纬度坐标、第二经纬度坐标、实际航向与估计航向,将未匹配船舶与真实船舶进行匹配,得到所述未匹配船舶的匹配结果,并将未匹配船舶标记为匹配船舶。2.根据权利要求1所述的船舶信息匹配方法,其特征在于,所述采用morphing算法计算所述当前图像与所述标定图像的映射关系,包括:s501、预先在所述标定图像的背景及当前图像的背景中标定具有映射关系的多个标定点,分别在所述标定图像的背景中及当前图像的背景中连接多个标定点,将对应图像的背景划分为多个三角区域;其中,所述标定图像中标定点间的连线为直线段,所述当前图像中标定点间的连线为折线段,每个折线段由点集组成;s502、对于当前图像中任一像素点x,根据当前图像的背景确定其落入的三角区域efg;s503、根据三角区域efg及标定图像的背景确定标定图像中对应的三角区域,根据线对、、和点集、、计算标定图像中对应的点。3.根据权利要求2所述的船舶信息匹配方法,其特征在于,所述在当前图像的背景中连接多个标定点,包括:s5011、提取所述标定图像的背景中所有可以构成路径的标定点,通过线对和计算间点在所述当前图像的背景上的投影,得到点集;s5012、连接所述点集中的各点,作为折线段;s5013、重复步骤s5011-s5012,计算当前图像的背景中所有连线对应的折线段及点集。4.根据权利要求1所述的船舶信息匹配方法,其特征在于,所述根据实际经纬度坐标
、第一经纬度坐标、第二经纬度坐标、实际航向与估计航向,将未匹配船舶与真实船舶进行匹配,得到所述未匹配船舶的匹配结果,包括:s801、将所述当前图像的多条航道对应转化为经纬度坐标系中的多条航道坐标轴;s802、在所述经纬度坐标系中,将未匹配船舶根据估计航向投影到距离最近的航道坐标轴,得到第一经纬度坐标对应的第三经纬度坐标,第二经纬度坐标对应的第四经纬度坐标;s803、在所述经纬度坐标系中,将真实船舶根据实际航向投影到距离最近的航道坐标轴,得到实际经纬度坐标对应的第五经纬度坐标;s804、取为未匹配船舶至真实船舶的权值,采用km算法计算最小权完备匹配,得到未匹配船舶的匹配结果。5.根据权利要求4所述的船舶信息匹配方法,其特征在于,所述取为未匹配船舶至真实船舶的权值之前,包括:s805、根据计算误差值在所述经纬度坐标系中确定每条航道坐标轴的最优范围;s806、根据所述中点运动轨迹计算未匹配船舶的估计航速;根据所述估计航向确定未匹配船舶在对应航道坐标轴上的行驶方向;根据所述未匹配船舶的第三经纬度坐标及第四经纬度坐标判断所述未匹配船舶是否位于对应航道坐标轴的最优范围内;若所述未匹配船舶位于对应航道坐标轴的最优范围内、估计航速不为0且行驶方向为驶入方向,则该未匹配船舶参与权值计算;否则,不参与权值计算;s807、根据所述船舶ais信息确定真实船舶的实际航速;根据所述实际航向确定真实船舶在对应航道坐标轴上的行驶方向;根据所述真实船舶的第五经纬度坐标确定所述真实船舶是否位于对应航道的最优范围内;若所述真实船舶位于对应航道坐标轴的最优范围内、实际航速不为0且行驶方向为驶入方向,则该真实船舶参与权值计算;否则,不参与权值计算。6.一种船舶信息匹配装置,其特征在于,包括:数据获取模块,用于实时获取当前图像,预先获取当前图像对应的地图图像;船舶识别模块,用于识别所述当前图像中目标船舶对应的第一目标框及关联图像中目标船舶对应的第二目标框;其中,所述关联图像为在当前图像前获取的具有同一船舶的图像;下缘线段提取模块,用于根据所述关联图像判断所述目标船舶是否为匹配船舶,若否,则将所述目标船舶标记为未匹配船舶,并对所述第一目标框及第二目标框中的图像分别进行直线提取,得到每个目标框中未匹配船舶与水面交界的下缘线段,提取每个下缘线段的左端点、右端点及中点;若是,则仅计算所述当前图像中下缘线段对应的中点,将中点记录;估计航向计算模块,用于根据第一目标框及多个第二目标框对应的中点运动轨迹,计算所述未匹配船舶的估计航向;映射关系计算模块,用于将所述地图图像进行透视变换,得到标定图像,采用morphing算法计算所述当前图像与所述标定图像的映射关系;
经纬度确定模块,用于根据所述映射关系及所述标定图像,得到所述当前图像对应下缘线段的左端点的第一经纬度坐标及右端点的第二经纬度坐标;真实船舶信息计算模块,用于根据最近时刻获取的船舶ais信息,计算当前图像获取时刻真实船舶的实际经纬度坐标和实际航向;信息匹配模块,用于根据实际经纬度坐标、第一经纬度坐标、第二经纬度坐标、实际航向与估计航向,将未匹配船舶与真实船舶进行匹配,得到所述未匹配船舶的匹配结果,并将未匹配船舶标记为匹配船舶。7.根据权利要求6所述的船舶信息匹配装置,其特征在于,所述映射关系计算模块包括:预标定子模块,用于预先在所述标定图像的背景及当前图像的背景中标定具有映射关系的多个标定点,分别在所述标定图像的背景中及当前图像的背景中连接多个标定点,将对应图像的背景划分为多个三角区域;其中,所述标定图像中标定点间的连线为直线段,所述当前图像中标定点间的连线为折线段,每个折线段由点集组成;区域确定子模块,用于对于当前图像中任一像素点x,根据当前图像的背景确定其落入的三角区域efg;映射关系计算子模块,用于根据三角区域efg及标定图像的背景确定标定图像中对应的三角区域,根据线对、、和点集、、计算标定图像中对应的点。8.根据权利要求7所述的船舶信息匹配装置,其特征在于,所述预标定子模块包括:点集生成单元,用于提取所述标定图像的背景中所有可以构成路径的标定点,通过线对和计算间点在所述当前图像的背景上的投影,得到点集;连线单元,用于连接所述点集中的各点,作为折线段;循环单元,用于控制重复点集生成单元及连线单元的操作,计算当前图像的背景中所有连线对应的折线段及点集。9.根据权利要求6所述的船舶信息匹配装置,其特征在于,所述信息匹配模块包括:转化子模块,用于将所述当前图像的多条航道对应转化为经纬度坐标系中的多条航道坐标轴;第一投影坐标计算子模块,用于在所述经纬度坐标系中,将未匹配船舶根据估计航向投影到距离最近的航道坐标轴,得到第一经纬度坐标对应的第三经纬度坐标,第二经纬度坐标对应的第四经纬度坐标;第二投影坐标计算子模块,用于在所述经纬度坐标系中,将真实船舶根据实际航向投影到距离最近的航道坐标轴,得到实际经纬度坐标对应的第五经纬度坐标;全局匹配子模块,用于取为未匹配船舶至真实船舶的权值,采用km算法计算最小权完备匹配,得到未匹配船舶的匹配结果。10.根据权利要求9所述的船舶信息匹配装置,其特征在于,所述信息匹配模块还包括:
最优范围确定子模块,用于根据计算误差值在所述经纬度坐标系中确定每条航道坐标轴的最优范围;第一过滤子模块,用于根据所述中点运动轨迹计算未匹配船舶的估计航速;根据所述估计航向确定未匹配船舶在对应航道坐标轴上的行驶方向;根据所述未匹配船舶的第三经纬度坐标及第四经纬度坐标判断所述未匹配船舶是否位于对应航道坐标轴的最优范围内;若所述未匹配船舶位于对应航道坐标轴的最优范围内、估计航速不为0且行驶方向为驶入方向,则该未匹配船舶参与权值计算;否则,不参与权值计算;第二过滤子模块,用于根据所述船舶ais信息确定真实船舶的实际航速;根据所述实际航向确定真实船舶在对应航道坐标轴上的行驶方向;根据所述真实船舶的第五经纬度坐标确定所述真实船舶是否位于对应航道的最优范围内;若所述真实船舶位于对应航道坐标轴的最优范围内、实际航速不为0且行驶方向为驶入方向,则该真实船舶参与权值计算;否则,不参与权值计算。
技术总结
本发明实施例公开了一种船舶信息匹配方法及装置,其中,该方法包括:人工识别图像中的船舶,通过像素-经纬度的转换计算,得到画面中每个船舶的经纬度及航向。通过AIS信息计算真实船舶相应时刻的经纬度及航向,并与未匹配船舶的经纬度及航向匹配,得到图像中船舶的船名等信息。联动后台稽查数据,对所有船只在画面中显示,对稽查有问题的船只在画面中特别标注。本发明实施例通过计算监控图像中船舶状态,并将其与AIS信息中船舶状态进行匹配的方案,解决了现有技术中全景相机无法通过识别船牌获得船舶信息的问题,并通过改良的Morphing技术得到监控画面中每个像素对应的经纬度,提高识别准确率。高识别准确率。高识别准确率。
技术研发人员:沈琳 俞永方 吴显德 何文平 徐炜 郭艳艳 陈娟娟
受保护的技术使用者:杭州声飞光电技术有限公司
技术研发日:2022.06.27
技术公布日:2022/7/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。