技术特征:
1.岩石、凹坑环境下的障碍检测方法,其特征在于,包括:步骤s1:提取tof相机点云数据,对每个三维特征点进行局部平面拟合,并对每个三维特征点进行法向量赋值;步骤s2:对相邻特征点的指向差异大于90deg的法向量做剔除处理;步骤s3:对不同区域内的三维特征点的法向量的指向进行统计,对法向量指向的规律程度进行量化,并将法向量指向规律程度较差的区域对应的点云集编目为兴趣区;步骤s4:在兴趣区内搜索兴趣子区域;步骤s5:对兴趣子区域的显著度进行等级划分,不同的等级对应标注不同的地貌。2.如权利要求1所述的岩石、凹坑环境下的障碍检测方法,其特征在于,步骤s1中,特征点ω
i
的法向量n
i
所对应的局部平面是特征点ω
i
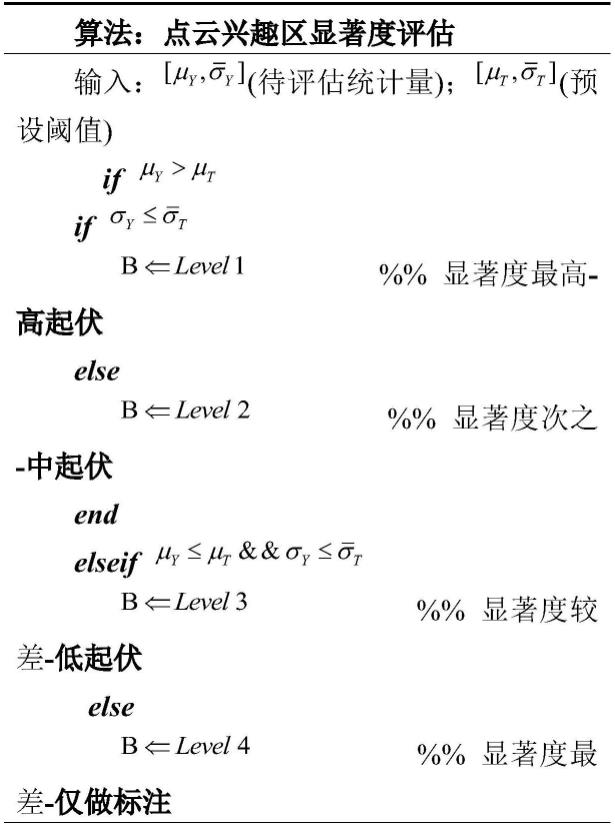
和它的k个最近邻特征点所拟合出的平面,所述局部平面采用最小二乘方法拟合得到;特征点ω
i
的法向量n
i
为拟合得到的局部平面的法向量。3.如权利要求2所述的岩石、凹坑环境下的障碍检测方法,其特征在于,步骤s1中拟合得到的法向量n
i
存在正负区别,即n
i
=
±
[β1,β2,β0]
t
,在步骤s2中,对相邻特征点的指向差异大于90deg的法向量做剔除处理,指向差异大于90deg通过n
i
·
n
j
<0进行判别。4.权利要求1所述的岩石、凹坑环境下的障碍检测方法,其特征在于,步骤s3中,通过判别局部三维点的法向量,可以间接推论地形的起伏程度,以数类经典的空间结构特征作为三维特征描述子,借鉴尺度空间下特征描述的方式。5.如权利要求2所述的岩石、凹坑环境下的障碍检测方法,其特征在于,所述步骤s1中具有自适应的k近邻算法来根据拟合数据的拟合效果的灵敏度对k值的大小进行调整。6.如权利要求5所述的岩石、凹坑环境下的障碍检测方法,其特征在于,步骤s4中,将特征点的k近邻选择范围作为起始点来搜索兴趣子区域,在k值较大的领域内随机选取特征点,并作一系列同心包络球体,通过当前所选特征点ω
i
进行同心球增长统计,便可以得到一个显著度极值s
max
(i),并记录对应区域所包含的特征点集合b
i
;特征点集合b
i
所对应的区域为兴趣子区域。7.如权利要求6所述的岩石、凹坑环境下的障碍检测方法,其特征在于,步骤s5中,通过遍历当前观测点云中k近邻最大的m个平面拟合区域,便可以得到一系列兴趣子区域的显著度,在此基础上,进一步统计兴趣子区域显著度均值以及标准差;根据均值以及标准差将兴趣子区域集合共划分4个显著度等级。8.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时,实现如权利要求1-7中任一项所述的岩石、凹坑环境下的障碍检测方法。9.一种电子设备,其特征在于,包括处理器和存储器,所述存储器上存储有计算机程序,所述计算机程序被所述处理器执行时,实现如权利要求1-7中任一项所述的岩石、凹坑环境下的障碍检测方法。
技术总结
本发明公开了一种岩石、凹坑环境下的障碍检测方法,该方法包括:首先进行了基于三维点云辨识性的地貌提取工作,将诸如岩石、凹坑等野外典型障碍统一归类为兴趣区地貌,在接收点云数据后,首先选择对每个三维特征点进行法向量赋值,通过最小二乘法拟合得出当前估计点以及邻域特征点相对局部平面的法向量,构建空间结构特征作为三维特征描述子,对跨尺度的三维特征进行归一化描述,量化其显著性,将兴趣子区域集合划分显著性等级,将显著度最差的地貌保留作为预警标注。本发明能够使无人系统在岩石、凹坑环境中行进实现对前方障碍的有效检测,提取无人系统前进方向可能遇到的障碍,便于无人系统能够提前进行预警制动。于无人系统能够提前进行预警制动。
技术研发人员:袁建平 贺亮 马川 宋婷 于洋
受保护的技术使用者:江苏云幕智造科技有限公司
技术研发日:2022.02.28
技术公布日:2022/7/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。