技术特征:
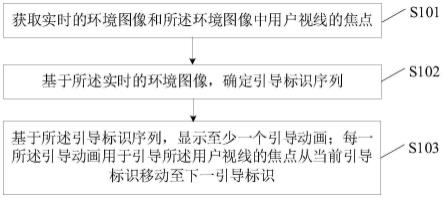
1.一种增强现实的引导方法,应用于增强现实设备,所述方法包括:获取实时的环境图像和所述环境图像中用户视线的焦点;基于所述实时的环境图像,确定引导标识序列;基于所述引导标识序列,显示至少一个引导动画;每一所述引导动画用于引导所述用户视线的焦点从当前引导标识移动至下一引导标识。2.根据权利要求1所述的方法,所述基于所述实时的环境图像,确定引导标识序列,包括:对所述实时的环境图像进行图像识别,得到第一环境特征点集合;基于所述第一环境特征点集合,确定引导标识序列。3.根据权利要求2所述的方法,所述基于所述第一环境特征点集合,确定引导标识序列,包括:获取与所述实时环境图像对应的标记样本图像;基于所述标记样本图像,对所述第一环境特征点集合中的环境特征点进行筛选,得到第二环境特征点集合;基于所述第二环境特征点集合,确定第一环境图像;所述第一环境图像包括至少一个图像区域;每一所述图像区域中环境特征点的密度大于密度阈值;基于所述至少一个图像区域,确定引导标识序列。4.如权利要求3所述的方法,所述基于所述标记样本图像,对所述第一环境特征点集合中的环境特征点进行筛选,得到第二环境特征点集合,包括:确定所述标记样本图像中每一环境特征点的特征描述子,得到第一特征描述子集合;确定所述第一环境特征点集合中每一所述环境特征点的特征描述子,得到第二特征描述子集合;确定所述第一特征描述子集合中每一特征描述子与所述第二特征描述子集合中每一特征描述子的相似度;将每一所述相似度满足相似度阈值的环境特征点确定为所述第二环境特征点集合中的元素。5.如权利要求3所述的方法,所述基于所述第二环境特征点集合,确定第一环境图像,包括:基于所述第二环境特征点集合,重建第二环境图像;将所述第二环境图像划分为至少一个图像区域;确定所述至少一个图像区域中环境特征点的密度;将每一所述环境特征点的密度大于密度阈值的区域确定为所述第一环境图像的图像区域。6.如权利要求3所述的方法,每一所述图像区域对应一个引导标识;所述基于所述至少一个图像区域,确定引导标识序列,包括:基于每一所述图像区域中环境特征点的密度对所述至少一个图像区域进行排序,得到所述至少一个图像区域的观察顺序;基于所述观察顺序,确定所述引导标识的顺序,得到引导标识序列。7.如权利要求1至6任一项所述的方法,所述方法还包括:
在所述用户视线的焦点未从所述当前引导标识移动至所述下一引导标识的情况下,循环显示所述至少一个引导动画。8.如权利要求1至6任一项所述的方法,所述方法还包括:获取所述用户视线的焦点的目标位置;获取所述目标位置上的环境图像;在检测到所述目标位置上的环境图像中不包括环境特征点的情况下,输出移动位置的提示信息。9.一种增强现实的引导装置,所述装置包括:获取模块,用于获取实时的环境图像和所述环境图像中用户视线的焦点;确定模块,用于基于所述实时的环境图像,确定引导标识序列;显示模块,用于基于所述引导标识序列,显示至少一个引导动画;每一所述引导动画用于引导所述用户视线的焦点从当前引导标识移动至下一引导标识。10.一种电子设备,包括存储器和处理器,所述存储器存储有可在处理器上运行的计算机程序,所述处理器执行所述程序时实现权利要求1至8任一项所述方法中的步骤。
技术总结
本申请实施例公开了一种增强现实的引导方法,应用于增强现实设备,所述方法包括:获取实时的环境图像和所述环境图像中用户视线的焦点;基于所述实时的环境图像,确定引导标识序列;基于所述引导标识序列,显示至少一个引导动画;每一所述引导动画用于引导所述用户视线的焦点从当前引导标识移动至下一引导标识。本申请实施例还同时提供了一种增强现实的引导装置、电子设备及存储介质。电子设备及存储介质。电子设备及存储介质。
技术研发人员:林眉子 班如庆 刘颖慧
受保护的技术使用者:联想(北京)有限公司
技术研发日:2022.03.30
技术公布日:2022/7/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。