技术特征:
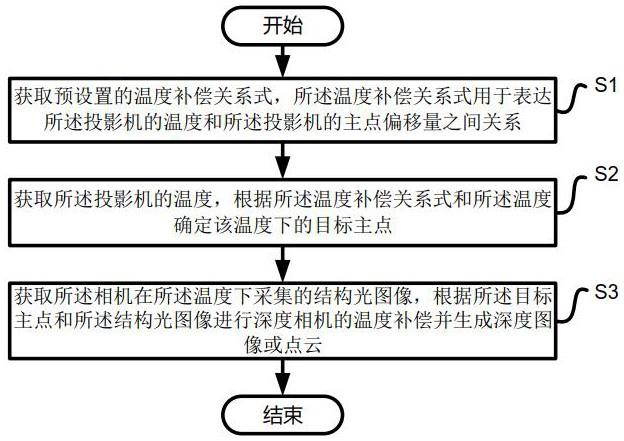
1.一种深度相机的温度补偿方法,所述深度相机包括相机和投影机,其特征在于,包括如下步骤:步骤s1:获取预设置的温度补偿关系式,所述温度补偿关系式用于表达所述投影机的温度和所述投影机的主点偏移量之间关系,所述投影机的主点为投影机的图像坐标系原点在像素坐标系中的位置,所述投影机的主点偏移量为所述投影机的主点沿所述像素坐标系的u轴或v轴的偏移量;步骤s2:获取所述投影机的温度,根据所述温度补偿关系式和所述温度确定该温度下的目标主点;步骤s3:获取所述相机在所述温度下采集的结构光图像,根据所述目标主点和所述结构光图像进行深度相机的温度补偿并生成深度图像或点云,所述结构光图像为相移编码图像,所述主点偏移量根据至少两个不同温度下采集的所述相移编码图像的平均相位差值确定。2.根据权利要求1所述的深度相机的温度补偿方法,其特征在于,所述步骤s1包括如下步骤:步骤s101:在多个环境温度下,获取所述投影机的多个温度,并在每一温度控制所述相机采集多张结构光图像;步骤s102:以一所述环境温度下的投影机为基准,确定多个温度下所述结构光图像的相位差值;步骤s103:根据所述相位差值确定多个温度下所述投影机的主点偏移量,进而建立能够表达所述温度和所述投影机的主点偏移量之间关系的温度补偿关系式。3.根据权利要求1所述的深度相机的温度补偿方法,其特征在于,所述步骤s2包括如下步骤:步骤s201:获取所述投影机的温度;步骤s202:根据所述温度补偿关系式和所述温度确定该温度下所述投影机的主点偏移量;步骤s203:获取主点标准值,根据所述主点偏移量和所述主点标准值确定主点校准值,即确定所述目标主点。4.根据权利要求3所述的深度相机的温度补偿方法,其特征在于,所述步骤s3包括如下步骤:步骤s301:获取所述相机在所述温度下采集的结构光图像;步骤s302:根据所述结构光图像计算得到在所述相机中光接收传感器上每一像素坐标值对应的绝对相位值;步骤s303:获取预标定生成的标定信息,所述标定信息包括投影机的内参矩阵,根据所述主点校准值对所述内参矩阵进行更新生成目标标定信息;步骤s304:根据所述绝对相位值和所述目标标定信息进行深度信息的计算,进而进行三维重建生成温度补偿后的所述深度图像或点云。5.根据权利要求4所述的深度相机的温度补偿方法,其特征在于,所述步骤s304包括如下步骤:步骤s3041:通过所述绝对相位值计算得到在所述投影机上对应的像素坐标值;
步骤s3042:根据所述光接收传感器和所述投影机相匹配的两个像素坐标值和所述目标标定信息,确定所述深度相机中光接收传感器的光心与每一物点坐标沿光接收传感器的光轴方向的距离,即生成每一像素的深度信息;步骤s3043:根据每一所述像素的深度信息进行三维重建生成温度补偿后的所述深度图像或点云。6.一种深度相机的温度补偿装置,所述深度相机包括相机和投影机,其特征在于,包括如下模块:关系建立模块,用于存储预设置的温度补偿关系式,所述温度补偿关系式用于表达温度和所述投影机的主点偏移量之间关系,所述投影机的主点为投影机的图像坐标系原点在像素坐标系中的位置,所述投影机的主点偏移量为所述投影机的主点沿所述像素坐标系的u轴或v轴的偏移量;主点计算模块,用于获取所述投影机的温度,根据所述温度补偿关系式和所述温度确定该温度下的目标主点;温度补偿模块,用于获取所述相机在所述温度下采集的结构光图像,根据所述目标主点和所述结构光图像进行深度相机的温度补偿并生成深度图像或点云,所述结构光图像为相移编码图像,所述主点偏移量根据至少两个不同温度下采集的所述相移编码图像的平均相位差值确定。7.一种深度相机的温度补偿设备,其特征在于,包括:处理器;存储器模块,其中存储有所述处理器的可执行指令;其中,所述处理器配置为经由执行所述可执行指令来执行权利要求1至5任一项所述的深度相机的温度补偿方法的步骤。8.一种计算机可读存储介质,用于存储程序,其特征在于,所述程序被执行时实现权利要求1至5任一项所述的深度相机的温度补偿方法的步骤。
技术总结
本发明提供了一种深度相机的温度补偿方法、装置、设备及存储介质,所述深度相机包括相机和投影机,包括如下步骤:获取预设置的温度补偿关系式,所述温度补偿关系式用于表达所述投影机的温度和所述投影机的主点偏移量之间关系;获取所述投影机的温度,根据所述温度补偿关系式和所述温度确定该温度下的目标主点;获取所述相机在所述温度下采集的结构光图像,根据所述目标主点和所述结构光图像进行深度相机的温度补偿并生成深度图像或点云。本发明能够根据投影机工作的实际温度计算出校准后的目标主点,进而修改投影机的内参以实现深度相机的温度补偿,降低了深度重建中的误差,拓展了深度相机的工作范围。展了深度相机的工作范围。展了深度相机的工作范围。
技术研发人员:杨光 林宇骏 黄煜 苏公喆 周佳骥
受保护的技术使用者:星猿哲科技(上海)有限公司
技术研发日:2022.07.19
技术公布日:2022/8/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。