技术特征:
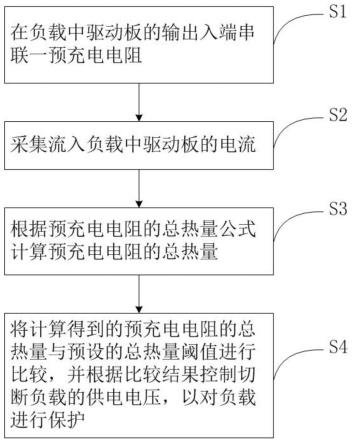
1.一种协作机器人负载保护方法,其特征在于,包括以下步骤:在负载中驱动板的输出入端串联一预充电电阻;采集流入负载中驱动板的电流;根据预充电电阻的阻值和流入负载中驱动板的电流计算预充电电阻的总热量;将计算得到的预充电电阻的总热量与预设的总热量阈值进行比较,如果预充电电阻的总热量大于或等于预设的总热量阈值,则控制切断负载的供电电压,以对负载进行保护。2.根据权利要求1所述的协作机器人负载保护方法,其特征在于,所述根据预充电电阻的阻值和流入负载中驱动板的电流计算预充电电阻的总热量的过程为:预充电电阻的总热量通过公式y
c
=∫(i*i-x)rdt计算得到,其中,y
c
表示预充电电阻的总热量,i表示流经预充电电阻的电流,x表示电流采样误差值,r表示预充电电阻的阻值,t表示时间。3.根据权利要求1所述的协作机器人负载保护方法,其特征在于,还包括以下步骤:预设电流阈值,将采集到的流入负载中驱动板的电流与预设的电流阈值进行比较,如果采集到的流入负载中驱动板的电流大于或等于电流阈值,则控制切断负载的供电电压。4.根据权利要求3所述的协作机器人负载保护方法,其特征在于,还包括以下步骤:采集负载中驱动板的输入电压;设置过压阈值和欠压阈值;将驱动板的输入电压与过压阈值和欠压阈值进行比较,如果驱动板的输入电压大于或等于过压阈值,或者驱动板的输入电压小于或等于欠压阈值,则控制切断负载的供电电压。5.根据权利要求1或2或3或4所述的协作机器人负载保护方法,其特征在于,还包括以下步骤:将电路异常原因发送给用户终端,以便于用户及时进行故障排查。6.根据权利要求1或2或3或4所述的协作机器人负载保护方法,其特征在于,为所述预充电电阻并联一预充电开关,所述预充电开关用于当预充电电阻的总热量大于或等于预设的总热量阈值时闭合,以短路预充电电阻。7.一种协作机器人负载保护装置,其特征在于,包括mcu以及与所述mcu连接的动力电源模块、缓启动模块、电流采样模块、保护开关和通讯模块;所述动力电源模块通过所述缓启动模块连接负载中驱动板,所述mcu控制所述动力电源模块为所述负载提供动力电源;所述动力电源模块与缓启动模块连接的线路上设置有所述电流采样模块和保护开关,所述保护开关与mcu连接,所述mcu用于控制所述保护开关打开或闭合;所述缓启动模块包括预充电电阻,所述预充电电阻的一端连接保护开关或电流采样模块,其另一端连接负载中驱动板;所述通讯模块用于针对不同的负载在所述mcu中设置电流采样误差值以及总热量阈值,还用于将电路异常原因发送给用户终端,以便于用户及时进行故障排查。8.根据权利要求7所述的协作机器人负载保护装置,其特征在于,还包括电压采样模块,所述电压采样模块与mcu连接,其用于检测负载中驱动板的输入电压。9.根据权利要求7所述的协作机器人负载保护装置,其特征在于,所述缓启动模块还包括预充电开关,所述预充电开关并联在所述预充电电阻的两端。10.一种协作机器人,其特征在于,包括负载和如权利要求7-9任一项所述的协作机器
人负载保护装置,所述负载保护装置与负载中的驱动板连接,所述负载保护装置用于为所述负载提供动力电源并对所述负载进行供电保护。
技术总结
本申请提供了一种协作机器人负载保护方法、保护装置及协作机器人,协作机器人负载保护方法包括以下步骤:在负载中驱动板的输出入端串联一预充电电阻;采集流入负载中驱动板的电流;根据预充电电阻的阻值和流入负载中驱动板的电流计算预充电电阻的总热量;将计算得到的预充电电阻的总热量与预设的总热量阈值进行比较,如果预充电电阻的总热量大于或等于预设的总热量阈值,则控制切断负载的供电电压,以对负载进行保护。本申请能够安全、高效地满足协作机器人控制系统中动力设备的电源需求,且当负载出现故障时能够检测到异常,并能够启动保护以切断其供电电压;当负载故障排除恢复后,负载能够重新得到电源供应。负载能够重新得到电源供应。负载能够重新得到电源供应。
技术研发人员:杨跞 刘贵庆 程小猛 陈宏伟 许楠
受保护的技术使用者:中科新松有限公司
技术研发日:2022.05.23
技术公布日:2022/8/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。