技术特征:
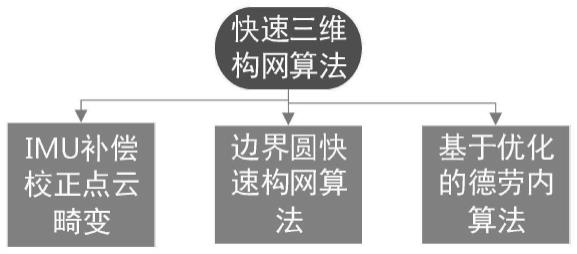
1.一种密闭空间快速三维模型重构方法,包括以下步骤,步骤1,密闭空间手持slam系统数据采集,包括使用带可见光摄像头的采集设备,在密闭空间采集目标物的颜色和纹理信息;步骤2,密闭空间三维点云生成,包括以一帧的激光雷达为基准,通过邻近时间且包含此帧的激光雷达的所有imu数据进行预积分处理,对每一个点云的点实现位姿补偿;步骤3,采集点云的预处理,包括对点云用统计滤波方式进行去噪,并进行数据精简,减少数据冗余并提高存储和运行效率;步骤4,快速三维构网,包括在采集点云的同时对校正后的点云进行三角剖分,初始化边界圆快速构网所需圆半径参数,计算出每个三角面片的法线向量,以此计算结果确定边界线,进行alpha-shape构网;步骤5,模型优化,包括遍历每个点,判定存在的空洞三角形,并将找到的空洞三角形建立外接圆然后删除三角形,剩下的多边形中将顶点包含辅助窗口的三角形全部删除,从而实现对漏洞的自动填充修补。2.根据权利要求1所述密闭空间快速三维模型重构方法,其特征在于:步骤1包括以下子步骤,步骤1.1,针对不同的环境设置手持slam采集参数;步骤1.2,数据采集,包括激光和imu数据;步骤1.3,求出传感器相对于初始位姿的位姿变换,最后统一到传感器起始位姿坐标系下,实现传感器位姿状态的更新。3.根据权利要求1所述密闭空间快速三维模型重构方法,其特征在于:步骤2包括以下子步骤,步骤2.1,寻找配对数据,以激光雷达为基准,找到包含激光雷达一帧的点的起始、结束时刻的imu数据;步骤2.2,imu数据积分处理,以第一个imu为基准坐标,依次积分所有的imu数据,使每一个imu都得到一个对应位姿;步骤2.3,计算激光雷达相对位姿,然后插值出这个激光雷达时刻的姿态,并将这个imu坐标系下的姿态转换成激光雷达坐标系相对于第一个imu坐标系的姿态;步骤2.4,将整个点云的点按照步骤2.3的处理结果,对每一个点进行运动补偿并生成校正后的点云。4.根据权利要求1所述密闭空间快速三维模型重构方法,其特征在于:步骤3包括以下子步骤,步骤3.1,点云去噪,通过统计滤波,预先指定一个阈值,对整体点云剔除测量噪声点;步骤3.2,数据精简,将构建三维场景点云中的操作前置,减少数据冗余并提高存储和运行效率。5.根据权利要求1所述密闭空间快速三维模型重构方法,其特征在于:步骤4包括以下子步骤,步骤4.1,首先对校正后的点云进行三角剖分,初始化边界圆快速构网算法中的圆半径参数,计算出每个三角面片的法线向量;步骤4.2,确定边界线,进行alpha-shape构网。
6.根据权利要求1所述密闭空间快速三维模型重构方法,其特征在于:步骤5包括以下子步骤,步骤5.1,遍历每个点,寻找空洞三角形;步骤5.2,将找到的空洞三角形分别建立外接圆并删除三角形,得到剩下的多边形;步骤5.3,将顶点包含辅助窗口的三角形全部删除,得到优化后的三角网。7.根据权利要求1或2或3或4或5或6所述密闭空间快速三维模型重构方法,其特征在于:对特殊区域进行约束,避免被当作漏洞修补;同时最终模型支持用户用于人为编辑,以校正自动优化出现的错误点、错误线和错误面。8.根据权利要求1或2或3或4或5或6所述密闭空间快速三维模型重构方法,其特征在于:用于昏暗密闭环境的快速实时构网。9.根据权利要求8所述密闭空间快速三维模型重构方法,其特征在于:所述昏暗密闭环境为隧道或煤矿快速实时构网。
技术总结
本发明公开了一种密闭空间三维模型重构方法,提供一种针对隧道、煤矿等昏暗密闭环境的快速实时构网的方法。该方法包括密闭空间手持SLAM系统数据采集,密闭空间三维点云生成,采集点云的预处理,快速三维构网,模型优化,包括遍历每个点,判定存在的空洞三角形,并将找到的空洞三角形建立外接圆然后删除三角形,剩下的多边形中将顶点包含辅助窗口的三角形全部删除,从而实现对漏洞的自动填充修补。本发明采集密闭空间点云,然后用IMU进行预积分补偿每个点云的运动畸变;随后对点云进行预处理,降低数据冗余并提高精度;快速构网与采集点云的显示同步,且最终模型精度达到厘米级;并可进行模型优化,为快速三维模型重构提供了一种新方案思路。一种新方案思路。一种新方案思路。
技术研发人员:胡庆武 赵昊政 王海银 赵鹏程 艾明耀 牟雪松 李加元
受保护的技术使用者:武汉大学
技术研发日:2022.04.29
技术公布日:2022/8/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。