技术特征:
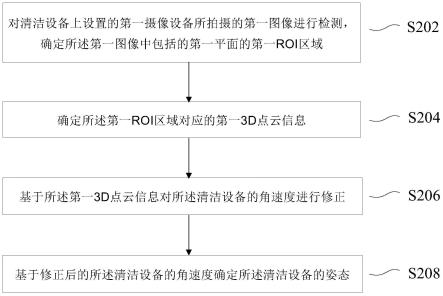
1.一种姿态的确定方法,其特征在于,包括:对清洁设备上设置的第一摄像设备所拍摄的第一图像进行检测,确定所述第一图像中包括的第一平面的第一roi区域;确定所述第一roi区域对应的第一3d点云信息;基于所述第一3d点云信息对所述清洁设备的角速度进行修正;基于修正后的所述清洁设备的角速度确定所述清洁设备的姿态。2.根据权利要求1所述的姿态的确定方法,其特征在于,确定所述第一roi区域对应的第一3d点云信息包括:在确定所述清洁设备中包括目标传感器的情况下,确定所述目标传感器所采集到的目标区域的3d点云信息,其中,所述第一图像为对所述目标区域进行拍摄所得到的图像,且所述第一图像的拍摄时间和所述目标传感器采集所述目标区域的3d点云信息的时间相差小于预定阈值;将所述第一图像中包括的全部像素点与所述目标区域的3d点云信息进行配准;基于配准结果确定所述第一roi区域对应的所述第一3d点云信息。3.根据权利要求1所述的姿态的确定方法,其特征在于,确定所述第一roi区域对应的第一3d点云信息包括:在确定所述清洁设备中不包括目标传感器的情况下,对所述第一摄像设备所拍摄的第二图像进行检测,确定所述第二图像中包括的第二平面的第二roi区域,其中,所述第二图像为所述第一图像的前一帧图像;提取所述第一roi区域的第一2d特征点,以及,提取所述第二roi区域的第二2d特征点;基于特征点匹配方式对所述第一2d特征点与所述第二2d特征点进行匹配;基于匹配结果确定所述第一roi区域对应的所述第一3d点云信息。4.根据权利要求3所述的姿态的确定方法,其特征在于,基于匹配结果确定所述第一roi区域对应的第一3d点云信息包括:确定所述第一摄像设备的平面约束,并基于所述匹配结果和所述平面约束确定目标单应矩阵;基于所述目标单应矩阵确定所述第一图像与所述第二图像之间的旋转矩阵和不带尺度的平移向量;基于所述清洁设备的第一传感器和/或第一算法确定所述第一图像与所述第二图像之间的绝对位置增量;基于所述不带尺度的平移向量和所述绝对位置增量确定带尺度的平移向量;对所述带尺度的平移向量和所述匹配结果进行三角化,以确定所述第一roi区域对应的第一3d点云信息。5.根据权利要求1所述的姿态的确定方法,其特征在于,对清洁设备上设置的第一摄像设备所拍摄的第一图像进行检测,确定所述第一图像中包括的第一平面的第一roi区域包括:利用神经网络模型对所述第一图像进行检测,确定所述第一图像中包括的所述第一平面的所述第一roi区域,其中,所述神经网络模型为利用训练数据对初始神经网络模型进行训练后所得到的模型,所述训练数据包括多组数据,每组数据均包括训练图像以及所述训
练图像中所包括的平面的roi区域。6.根据权利要求1所述的姿态的确定方法,其特征在于,基于所述第一3d点云信息对所述清洁设备的角速度进行修正包括:按照目标筛选方式从所述第一3d点云中筛选出目标3d点云,并基于所述目标3d点云确定第一平面方程;从所述目标3d点云中确定出目标最大3d点云,并基于所述目标最大3d点云和huber鲁棒核函数通过最小二乘优化生成目标平面方程,其中,所述目标最大3d点云为距离所述第一平面方程小于预定距离阈值的3d点云;基于所述目标平面方程对所述角速度进行修正。7.根据权利要求6所述的姿态的确定方法,其特征在于,基于所述目标平面方程对所述角速度进行修正包括:确定所述清洁设备的上一时刻姿态的四元数,并基于所述上一时刻姿态的四元数确定所述上一时刻姿态的第二平面方程;确定所述目标平面方程与所述第二平面方程之间的平面方程差值,以及,获取所述清洁设备的陀螺仪角速度测量值;基于所述平面方程差值确定角速度修正量,并基于所述角速度修正量对所述陀螺仪角速度测量值进行修正,得到修正后的角速度。8.根据权利要求7所述的姿态的确定方法,其特征在于,在基于所述平面方程差值确定角速度修正量,并基于所述角速度修正量对所述陀螺仪角速度测量值进行修正,得到修正后的角速度之后,所述方法还包括:基于所述修正后的角速度对所述上一时刻姿态的四元数进行更新,以得到更新后的当前时刻姿态的四元数;对所述当前时刻姿态的四元数进行归一化处理,并将归一化处理后的所述四元数转化为欧拉角;基于所述欧拉角确定所述清洁设备的更新姿态。9.根据权利要求1所述的姿态的确定方法,其特征在于,在对清洁设备上设置的第一摄像设备所拍摄的第一图像进行检测,确定所述第一图像中包括的第一平面的第一roi区域之前,所述方法还包括:对所述清洁设备中包括的传感器的参数进行标定,所述参数如下至少之一:所述第一摄像设备的内参矩阵和畸变模型;所述清洁设备的陀螺仪的内参;所述第一摄像设备坐标系和所述陀螺仪坐标系之间的外参;所述陀螺仪坐标系和所述清洁设备的机体坐标系之间的外参;所述清洁设备中包括的目标传感器的点云内参模型;所述目标传感器坐标系和所述陀螺仪坐标系之间的外参。10.一种姿态的确定装置,其特征在于,包括:第一确定模块,用于对清洁设备上设置的第一摄像设备所拍摄的第一图像进行检测,确定所述第一图像中包括的第一平面的第一roi区域;第二确定模块,用于确定所述第一roi区域对应的第一3d点云信息;
修正模块,用于基于所述第一3d点云信息对所述清洁设备的角速度进行修正;第三确定模块,用于基于修正后的所述清洁设备的角速度确定所述清洁设备的姿态。11.一种清洁设备,其特征在于,包括权利要求10所述的姿态的确定装置。12.一种计算机可读的存储介质,其特征在于,所述计算机可读的存储介质包括存储的程序,其中,所述程序运行时执行上述权利要求1至9任一项中所述的方法。13.一种电子装置,包括存储器和处理器,其特征在于,所述存储器中存储有计算机程序,所述处理器被设置为通过所述计算机程序执行所述权利要求1至9任一项中所述的方法。
技术总结
本发明实施例提供了一种姿态的确定方法、装置、清洁设备、存储介质及电子装置,其中,该方法包括:对清洁设备上设置的第一摄像设备所拍摄的第一图像进行检测,确定第一图像中包括的第一平面的第一ROI区域;确定第一ROI区域对应的第一3D点云信息;基于第一3D点云信息对清洁设备的角速度进行修正;基于修正后的清洁设备的角速度确定清洁设备的姿态。通过本发明,有效解决相关技术中存在的需要依赖于加速度计进行姿态估计,从而导致估计误差较大的问题。题。题。
技术研发人员:韩松杉 盛腾飞 王睿麟
受保护的技术使用者:追觅创新科技(苏州)有限公司
技术研发日:2022.06.28
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。