技术特征:
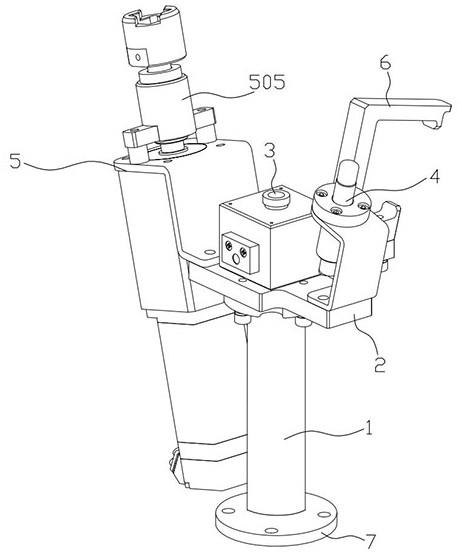
1.一种基于视觉识别的集成化机械臂末端执行件,其特征在于,包括中空圆柱工件,所述中空圆柱工件的顶端连接有带孔工件,所述带孔工件上连接有视觉相机、触压执行件、旋转执行件和拨动执行件,以所述视觉相机的位置为三维坐标系的原点,所述触压执行件的触压头处于三维坐标系的平面上,所述旋转执行件的旋转头处于三维坐标系的平面上,所述触压执行件和所述旋转执行件分布设置在所述视觉相机的两侧,所述拨动执行件的拨动头处于三维坐标系的平面上。2.根据权利要求1所述的基于视觉识别的集成化机械臂末端执行件,其特征在于,所述触压执行件包括第一支撑板,第一支撑板设置为c字型,所述第一支撑板的底端固定设置在所述带孔工件上,所述第一支撑板的顶部倾斜设置触压杆,所述触压杆包括触压头,所述触压头由橡胶或聚氨酯材料制成。3.根据权利要求2所述的基于视觉识别的集成化机械臂末端执行件,其特征在于,所述触压杆包括外套杆,所述外套杆贯穿设置套接通槽,所述套接通槽包括自下而上依次设置的第一套槽和第二套槽,所述第一套槽和所述第二套槽两者相接的位置形成阶台,所述外套杆通过所述套接通槽套接配合有内套杆,所述内套杆的中部偏上位置设置有抵接侧边,所述第二套槽内设置有弹簧,所述弹簧与所述内套杆相套接,所述阶台与所述弹簧的一端相抵接,所述弹簧的另一端与所述抵接侧边的一侧相抵接,所述抵接侧边的另一侧抵接配合连接环块,所述连接环块与所述外套杆固定连接,所述内套杆贯穿所述连接环块,所述连接环块通过螺栓固定设置在所述第一支撑板的顶部,所述触压头设置在所述内套杆的顶端。4.根据权利要求3所述的基于视觉识别的集成化机械臂末端执行件,其特征在于,所述第一套槽的口径小于第二套槽的口径,所述内套杆的外径与所述第一套槽的外径相适配,所述抵接侧边的外径与所述第二套槽的口径相适配。5.根据权利要求1所述的基于视觉识别的集成化机械臂末端执行件,其特征在于,所述旋转执行件包括第二支撑板,所述第二支撑板设置为z字型,所述第二支撑板的底端固定设置在所述带孔工件上,所述第二支撑板的顶部倾斜设置旋转件,所述旋转件包括旋转驱动电机、减速机和旋转头,所述旋转驱动电机的电机轴与所述减速机的输入轴相连接,所述减速机的输出轴与所述旋转头相连接,所述旋转驱动电机的壳体和所述减速机的壳体相连接,所述减速机的壳体固定设置在所述第二支撑板上,所述旋转头设置为四方锁钥匙头,在四方锁钥匙头内设置有力传感器。6.根据权利要求5所述的基于视觉识别的集成化机械臂末端执行件,其特征在于,所述减速机的输出轴穿过轴承座与所述旋转头相连接,所述轴承座固定设置在所述第二支撑板上。7.根据权利要求1所述的基于视觉识别的集成化机械臂末端执行件,其特征在于,所述拨动执行件包括c型杆,所述c型杆顶端设置为拨动头。8.根据权利要求1所述的基于视觉识别的集成化机械臂末端执行件,其特征在于,所述中空圆柱工件的底端设置有机械臂安装接口。9.一种基于权利要求1-8任一项所述的集成化机械臂末端执行件的操控方法,其特征
在于,包括以下步骤:s1.在调试时,人工调试机械臂,使得机械臂末端执行件完全对准操控对象;s2.记录下步骤s1中机械臂末端执行件相对于三维坐标系的预设空间坐标,其中,三维坐标系的原点为机械臂运动的初始端;s3.视觉相机拍摄下第一图像存储至中控系统内;s4.在操控时,机械臂运动到预设空间坐标所在位置,由视觉相机拍摄下第二图像,将第二图像和第一图像进行识别对比;s5.判断第一图像和第二图像是否完全重合,若完全重合,机械壁末端执行件对操控对象进行操控,若不重合,机械臂进行位置微调,视觉相机重新拍摄图像并与第一图像进行识别对比,直至完全重合。10.根据权利要求9所述的集成化机械臂末端执行件的操控方法,其特征在于,步骤s4中,在机械臂运动到预设空间坐标所在位置中,进行运动轨迹的处理,中控系统将相对于三维坐标系的预设空间坐标转化为相对于三维坐标系的预设空间坐标,运动轨迹为:机械臂末端执行件的实时位置—预设空间坐标所在的位置。
技术总结
本发明涉及一种基于视觉识别的集成化机械臂末端执行件及其操控方法,机械臂末端执行件包括中空圆柱工件、带孔工件、视觉相机、触压执行件、旋转执行件和拨动执行件及其位置布局关系;机械臂末端执行件的操控方法包括记录预设空间坐标、前后拍摄的图像对比是否重合、若重合则进行动作操控。将多个的单一执行件集成为一个整体,并对多个执行件进行位置布局设计,可以完成对液晶面板、电子按钮、手车旋孔、柜门锁具等操控对象的动作操控,避免了执行不同操控任务时需要更换执行件的弊端,同时避免多个单一执行件堆积在机械臂上的不同位置上,减少了机械臂的控制难度,再配合视觉相机,为机械臂操控提供了精确的定位功能。机械臂操控提供了精确的定位功能。机械臂操控提供了精确的定位功能。
技术研发人员:张霁明 邱剑斌 徐鲜泉 郁乐瑜 徐定康 胥晶 丁阳 张惠芳 蔡维维 施明君 张科波 林雯瑜 王超 沈科炬 罗立华 黄建平 陈浩 李钟煦 潘杰锋 杨跃平
受保护的技术使用者:宁波市永能电力产业投资有限公司鄞州电气分公司 国网浙江省电力有限公司宁波供电公司
技术研发日:2022.09.19
技术公布日:2022/10/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。