技术特征:
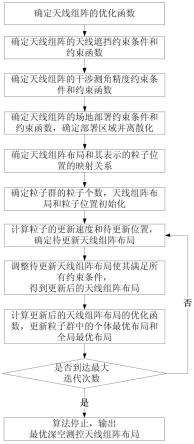
1.一种深空测控天线组阵布局优化设计方法,其特征在于,包括以下步骤:步骤一、确定天线组阵布局的优化函数;步骤二、确定天线遮挡约束条件,构建天线遮挡约束函数;确定干涉测角精度约束条件,构建干涉测角精度约束函数;确定场地部署约束条件,构建场地部署约束函数,并得到场地部署约束区域,将场地部署约束区域等面积离散化;步骤三、将在每个离散化区域中存在1个阵元或者不存在阵元作为离散量子粒子的位置,得到天线组阵布局和粒子位置的映射关系;步骤四、确定粒子群中的粒子个数,对每个粒子代表的天线组阵布局进行初始化,并根据天线组阵布局和粒子位置的映射关系,将粒子的位置初始化;步骤五、计算粒子群中每个粒子的更新速度和待更新位置,确定待更新天线组阵布局;步骤六、对待更新天线组阵布局进行调整,使得同时满足天线遮挡约束条件、干涉测角精度约束条件和场地部署约束条件,得到更新后的天线组阵布局;步骤七、计算更新后的天线组阵布局的优化函数,更新粒子群中的个体最优布局和全局最优布局;步骤八、判断粒子群是否达到粒子群的最大迭代次数,若否,则返回步骤五,若是,则选择粒子群中全局最优个体的天线组阵布局作为最优深空测控天线组阵布局。2.根据权利要求1所述的深空测控天线组阵布局优化设计方法,其特征在于,步骤一中天线组阵布局的优化函数具体为:式中,c是一种深空测控天线组阵布局,c={p1,p2,...,p
n
},n是c中的天线数目,p
n
是c中的任一天线的坐标,f
side
(c)、f
grating
(c)和f
peak
(c)分别表示c的方向图在旁瓣、栅瓣和主瓣特征方面的评分值,f(f
side
(c),f
grating
(c),f
peak
(c))表示关于f
side
(c)、f
grating
(c)和f
peak
(c)的函数,α
p
和β
p
分别表示主瓣的方位角和俯仰角。3.根据权利要求2所述的深空测控天线组阵布局优化设计方法,其特征在于,步骤二具体为:确定天线遮挡约束条件,即根据深空测控天线的直径和深空测控天线组阵俯仰维的最小跟踪角度计算得到深空测控天线之间的最小间距,并根据最小间距确定系统的天线遮挡约束函数;确定干涉测角精度约束条件,即根据深空测控天线组阵的检测信噪比阈值、深空测控天线组阵的角度测量精度和深空测控天线组阵俯仰维的最小跟踪角度,计算得到深空测控天线组阵的最小布阵孔径,并根据最小布阵孔径确定系统的干涉测角精度约束函数;确定场地部署约束条件,即根据部署现场的围墙高度、深空测控天线中心到地面的高度、深空测控天线组阵俯仰维的最小跟踪角度、天线直径和部署现场直径,计算得到满足现场部署范围时深空测控天线组阵的最大布阵孔径,并根据最大布阵孔径确定系统的场地部署约束函数和场地部署约束区域,将场地部署约束区域等面积离散化。4.根据权利要求3所述的深空测控天线组阵布局优化设计方法,其特征在于,步骤二中系统的天线遮挡约束条件和天线遮挡约束函数具体为:
天线遮挡约束条件:深空测控天线之间不产生相互遮挡,要求深空测控天线两两之间的距离差不低于最小间距d
1,min
=d1/sinα;其中,d1表示深空测控天线的直径,α表示深空测控天线组阵俯仰维的最小跟踪角度;天线遮挡约束函数:式中,||
·
||表示求模运算,min(
·
)表示所有计算结果中的最小值,any(
·
)表示任意一个计算结果,f1(c)取1表明天线组阵布局c满足约束条件1,取0表明不满足。5.根据权利要求4所述的深空测控天线组阵布局优化设计方法,其特征在于,步骤二中干涉测角精度约束条件和干涉测角精度约束函数具体为:干涉测角精度约束条件:深空测控天线组阵达到系统要求的干涉测角精度,要求深空测控天线组阵的布阵范围不低于深空测控天线组阵的最小布阵孔径其中snr表示深空测控天线组阵的检测信噪比阈值,δθ表示深空测控天线组阵的角度测量精度,α表示深空测控天线组阵俯仰维的最小跟踪角度,λ表示信号波长;干涉测角精度约束函数:式中,max(
·
)表示所有计算结果中的最大值,f2(c)取1表明天线组阵布局c满足约束条件2,取0表明不满足。6.根据权利要求5所述的深空测控天线组阵布局优化设计方法,其特征在于,步骤二中确定场地部署约束条件,构建场地部署约束函数,并得到场地部署约束区域,将场地部署约束区域等面积离散化,具体为:首先,确定场地部署约束条件和场地部署约束函数;场地部署约束条件:深空测控天线组阵进行现场部署时与围墙不产生遮挡,计算得到避免围墙遮挡时深空测控天线距离围墙的最小间距d
i,min
:式中,h1表示部署现场的围墙高度,h2表示深空测控天线中心到地面的高度,d1表示深空测控天线的直径,α表示深空测控天线组阵俯仰维的最小跟踪角度;计算得到满足现场部署范围时深空测控天线组阵的最大布阵孔径d
3,max
:式中,d2表示部署现场直径;场地部署约束函数:
式中,max(
·
)表示所有计算结果中的最大值,f3(c)取1表明天线组阵布局c满足约束条件3,取0表明不满足;然后,将部署场地中心设定为坐标系原点o,部署约束区域r3为以o为中心,将xoy平面上半径r3=d
3,max
/2的圆形区域;将r3划分成个子区域,每个子区域的覆盖面积均为πr
12
,并将第m个子区域记作a
m
;其中,7.根据权利要求6所述的深空测控天线组阵布局优化设计方法,其特征在于,步骤三具体为:由c确定的离散量子粒子位置记作w,并且w=[w1,w2,...,w
m
];其中,w的第m位w
m
取值为1或者0,分别表明c在子区域a
m
存在1个阵元或者不存在阵元,根据天线组阵阵元数目,n是天线组阵中抛物面天线的数目,表示第m个子区域中存在的阵元数,将上述由c确定对应的粒子是w这一函数关系记作w=θ(c)。8.根据权利要求7所述的深空测控天线组阵布局优化设计方法,其特征在于,步骤四具体为:根据d
2,min
、d
3,max
的几何平均数计算初始化的天线组阵区域半径r
gm
:然后,以o为中心,在xoy平面上半径r
gm
的圆形区域内均匀随机产生g种不同的天线组阵布局,每个天线组阵布局中具有n个相同的抛物面天线,其中,第g个天线组阵布局记作对天线布局c
g
,根据天线组阵布局和表示的粒子位置的映射关系得到w
g
=θ(c
g
),将粒子群的第g个粒子记作q
g
(w
g
,c
g
)。9.根据权利要求8所述的深空测控天线组阵布局优化设计方法,其特征在于,步骤五具体为:在第k 1次迭代中,计算粒子q
g
(w
g
,c
g
)的更新速度)的更新速度式中,ω,c1,c2是离散量子粒子的学习因子,为取值在[0,1]内的随机数,α,β是运动控制参数,为取值在[0,1]内的随机数,是粒子g为了学习自身的历史最优粒子w
e
(g)的速度分量,是粒子群中的任意粒子为了学习第k次迭代后的全局最优粒子w
r
(k)的速度分
量,是w
e
(g)的第m位取值,是w
r
(k)的第m位取值;其中,在第k次迭代后,粒子g自身的历史最优天线组阵布局表示为其自身的历史最优粒子位置为w
e
(g)=θ(c
e
(g)),全局最优天线组阵布局表示为全局最优粒子位置为w
r
(k)=θ(c
r
(k));是粒子群中任意粒子g在第k次迭代后的天线组阵布局;然后,计算粒子q
g
(w
g
,c
g
)的待更新位置:其中,rand()是随机生成的在[0,1]内均匀的随机数;计算若n'>n,则随机抽取n'-n个取值为1的将其重新赋值为0;若n'<n,则随机抽取n-n'个取值为0的将其重新赋值为1;待更新位置如果则在子区域a
m
内随机生成阵元位置,生成的阵元共n个,得到待更新的天线组阵布局10.根据权利要求9所述的深空测控天线组阵布局优化设计方法,其特征在于,步骤六具体为:初始调整算法a):将调整天线组阵布局看作求解等圆包装问题,利用拟物算法,对待更新的天线组阵布局进行调整,得到符合天线遮挡约束条件和场地部署约束条件的天线组阵布局平移扩大调整b):整体平移坐标得到使的中心位于坐标系原点,若则将中所有阵元的坐标扩大,扩大系数均为扩大后的阵列布局符合干涉测角精度约束条件,并赋值给迭代调整c):按顺序重复步骤a)~步骤b),直到同时满足天线遮挡约束条件、干涉测角精度约束条件和场地部署约束条件;得到更新后的天线组阵布局
技术总结
本发明涉及深空目标探测领域,公开了一种深空测控天线组阵布局优化设计方法,主要解决深空目标探测技术中天线组阵的基于多项约束条件的综合优化问题。本发明针对深空目标探测场景和测控天线阵列建立数学模型,并基于应用场景的典型优化函数和约束条件,约束条件综合考虑了天线遮挡问题、干涉测角精度和现场实地部署限制等,优化函数主要基于天线组阵的波束方向图的的评估结果。本发明设计了基于离散量子粒子群的高效天线组阵布局优化设计算法,在兼顾优化准则和约束条件的基础上,相较于传统的测控天线组阵布局设计方案更能够推动天线组阵布局的高效率优化。组阵布局的高效率优化。组阵布局的高效率优化。
技术研发人员:耿虎军 陈秀玲 杨伟军 夏双志 张旭旺
受保护的技术使用者:中国电子科技集团公司第五十四研究所
技术研发日:2022.08.19
技术公布日:2022/11/8
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。