技术特征:
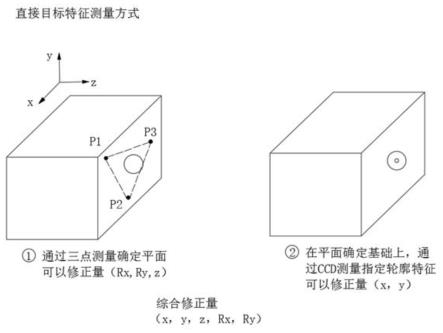
1.一种机器人测量加工方法,其特征在于,包括以下步骤:s1:先对工件进行粗定位,使工件在测量范围内;s2:使用测量技术测得工件的实际位置坐标与原来设定位置坐标偏差;s3:通过测量值使用软件算法求解坐标变换;s4:机器人利用修正的坐标进行轨迹运动;上述s2中的测量技术包括以下步骤:a1:通过三点测量确定平面可以修正量(rx,ry,z);a2:在平面确定基础上,通过2d的ccd测量指定轮廓特征可以修正量(x,y);a3:通过测量三点机械坐标值(x1,y1,z1);a4:利用x1,y1,z1创建用户坐标系u1;a5:利用用户坐标系u1,把2d的ccd移动到u1的xy平面拍照计算,获取圆心坐标;上述测量技术需要使用到测量设备,测量设备包括安装架(1),所述安装架(1)的右侧面设置有翻转机构(6),所述翻转机构(6)远离安装架(1)的一侧设置有旋转架(7),所述旋转架(7)的内部转动连接有距离测量计(3),所述距离测量计(3)的表面设置有旋转机构(9),所述旋转机构(9)包括驱动电机(17)、主动齿轮(18)以及从动齿轮(19),旋转架(7)的内部开设有旋转槽,所述驱动电机(17)螺接固定在旋转槽的内壁,所述主动齿轮(18)通过联轴器与驱动电机(17)的动力输出端传动连接,所述从动齿轮(19)与主动齿轮(18)啮合,且主动齿轮(18)安装在距离测量计(3)的一侧,安装架(1)上还设置有加工主轴(4),安装架(1)的侧面还设置有2d的ccd(2)和可调节基板(5);所述安装架(1)的内部设置有两组移动机构(10),两组所述移动机构(10)前后对称设置,所述移动机构(10)上方设置有定位机构(11),所述安装架(1)的上表面远离翻转机构(6)的一侧固定有支架(12),所述支架(12)上安装有警报灯(13);所述翻转机构(6)包括翻转座(14)、旋转电机(15)以及支撑杆(16),所述翻转座(14)固定在安装架(1)的右侧面,所述旋转电机(15)螺接在翻转座(14)的内壁,所述支撑杆(16)的左侧面通过联轴器与旋转电机(15)的动力输出端传动连接,且支撑杆(16)的右侧面固定在旋转架(7)的表面;所述旋转机构(9)还包括同步齿轮(20)与定位杆(21),所述同步齿轮(20)啮合在从动齿轮(19)的表面,所述同步齿轮(20)与主动齿轮(18)左右对称设置,所述定位杆(21)固定在同步齿轮(20)的下表面,且旋转槽的下端开设有定位孔,所述定位杆(21)转动连接在定位孔的内部;所述移动机构(10)包括步进电机(22)、螺纹杆(23)以及连接座(24),所述步进电机(22)通过螺钉固定在安装架(1)远离旋转架(7)的一侧表面,所述螺纹杆(23)通过联轴器与步进电机(22)的动力输出端传动连接,所述连接座(24)螺纹连接在螺纹杆(23)的表面。2.根据权利要求1所述的一种机器人测量加工方法,其特征在于:所述移动机构(10)还包括轴承座(25),所述轴承座(25)设置有两组,两组所述轴承座(25)套接在螺纹杆(23)的左右两端部圆周表面,且轴承座(25)固定在安装架(1)的内壁。3.根据权利要求2所述的一种机器人测量加工方法,其特征在于:所述定位机构(11)包括滑座(26)、滑轨(27)、安装底座(28)以及接触杆(29),所述滑座(26)固定在连接座(24)的上表面,所述滑轨(27)固定在安装架(1)的上表面中端,所述滑座(26)滑动连接在滑轨(27)
的表面,所述安装底座(28)固定在滑座(26)的上表面。4.根据权利要求3所述的一种机器人测量加工方法,其特征在于:所述接触杆(29)固定在安装底座(28)远离旋转架(7)的一侧表面,且接触杆(29)设置在警报灯(13)的侧端,支架(12)的侧表面设置有接触开关,接触开关与接触杆(29)对应,且接触开关与警报灯(13)电性连接,所述接触杆(29)与接触开关的表面相抵。5.根据权利要求4所述的一种机器人测量加工方法,其特征在于:所述可调节基板(5)包括转动部分、移动部分。6.根据权利要求5所述的一种机器人测量加工方法,其特征在于:所述加工主轴(4)上设置有预留螺纹孔。
技术总结
本发明公开了一种机器人测量加工方法,涉及到机器人加工设备领域,包括以下步骤:S1:先对工件进行粗定位,使工件在测量范围内;S2:使用测量技术测得工件的实际位置坐标与原来设定位置坐标偏差;S3:通过测量值使用软件算法求解坐标变换。本发明中距离测量计、2D的CCD相机可以利用多种通信方式和机器人通信;本发明中不需要外部上位机控制,测量转换算法直接在机器人控制器上开发。机器人控制器上开发。机器人控制器上开发。
技术研发人员:陈月军 郑元坚
受保护的技术使用者:广州太威机械有限公司
技术研发日:2022.10.10
技术公布日:2022/11/8
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。