技术特征:
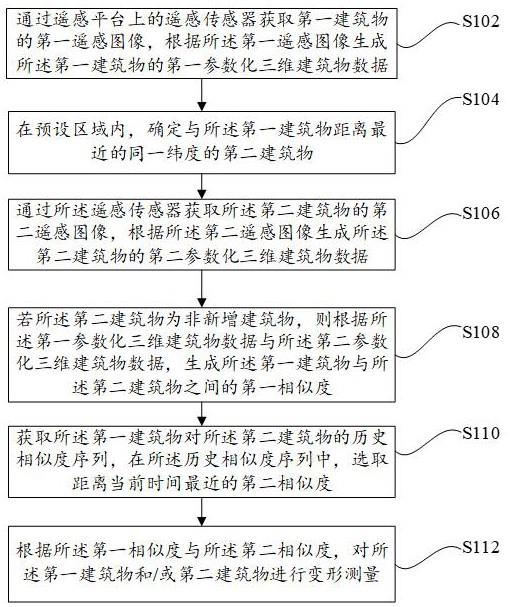
1.一种建筑物监测方法,其特征在于,所述方法包括:通过遥感平台上的遥感传感器获取第一建筑物的第一遥感图像,根据所述第一遥感图像生成所述第一建筑物的第一参数化三维建筑物数据;在预设区域内,确定与所述第一建筑物距离最近的同一纬度的第二建筑物;通过所述遥感传感器获取所述第二建筑物的第二遥感图像,根据所述第二遥感图像生成所述第二建筑物的第二参数化三维建筑物数据;若所述第二建筑物为非新增建筑物,则根据所述第一参数化三维建筑物数据与所述第二参数化三维建筑物数据,生成所述第一建筑物与所述第二建筑物之间的第一相似度;获取所述第一建筑物对所述第二建筑物的历史相似度序列,在所述历史相似度序列中,选取距离当前时间最近的第二相似度;根据所述第一相似度与所述第二相似度,对所述第一建筑物和/或第二建筑物进行变形测量。2.根据权利要求1所述的方法,其特征在于,所述方法还包括:若所述第二建筑物为新增建筑物,则根据所述第二建筑物的位置坐标,在预设建筑物数据库中,确定所述第二建筑物的建筑工程清单;根据所述建筑工程清单,确定所述第二建筑物的工程进度;根据所述工程进度,确定搭建所述第二建筑物时对所述第一建筑物的外界变形影响数据;根据所述外界变形影响数据,调整所述第一建筑物的多个变形参数所各自对应的初始权重值;根据调整的权重值与传感器上传的变形参数数据,通过预先构建的变形测量神经网络模型,确定所述第一建筑物的变形类型。3.根据权利要求1所述的方法,其特征在于,所述根据所述第一相似度与所述第二相似度,对所述第一建筑物和/或第二建筑物进行变形测量,具体包括:若所述第一相似度与所述第二相似度之间的差异值大于预设差异阈值,则调用预先构建的关系图谱;根据所述预先构建的关系图谱,确定所述差异值是否由所述第一建筑物引起;若所述差异值由所述第一建筑物引起,则在第一参数化三维建筑物数据中,确定引起所述差异值的第一目标参数数据;根据所述第一目标参数数据,对所述第一建筑物进行变形测量;若所述差异值由所述第二建筑物引起,则在第二参数化三维建筑物数据中,确定引起所述差异值的第二目标参数数据;根据所述第二目标参数数据,对所述第二建筑物进行变形测量。4.根据权利要求3所述的方法,其特征在于,所述根据所述第一目标参数数据,对所述第一建筑物进行变形测量,具体包括:获取所述第一建筑物在预设时长内的历史变形状态数据,并根据所述历史变形状态数据,确定所述第一建筑物对历史变形类型的历史变形序列;根据所述历史变形序列,确定对所述第一建筑物的内因变形影响数据;根据所述内因变形影响数据与所述第一目标参数数据,调整所述第一建筑物的多个变
形参数所各自对应的初始权重值;根据调整的权重值与传感器上传的变形参数数据,通过预先构建的变形测量神经网络模型,确定所述第一建筑物的变形类型。5.根据权利要求3所述的方法,其特征在于,所述根据所述预先构建的关系图谱,确定所述差异值是否由所述第一建筑物引起,具体包括:构建由多个建筑物节点和所述多个建筑物节点间的关联边构成的关系图谱;对所述多个建筑物节点进行分组;其中,同一个建筑物节点组中各建筑物节点的经度相同;根据所述关系图谱,确定各建筑物节点的变形隐患系数;在所述同一个建筑物节点组中,将所述变形隐患系数大于预设隐患阈值的建筑物节点,生成变形隐患建筑物节点组;根据所述变形隐患建筑物节点组,确定所述差异值是否由所述第一建筑物引起。6.根据权利要求5所述的方法,其特征在于,所述根据所述关系图谱,确定各建筑物节点的变形隐患系数,具体包括:为所述各建筑物节点生成初始化变形隐患系数;根据所述关系图谱,确定所述多个建筑物节点之间的变形隐患关联度;在确定第三建筑物节点发生变形时,在所述关系图谱中,匹配与所述第三建筑物节点的变形隐患关联度超过预设关联度阈值的第四建筑物节点;对所述第四建筑物节点的初始化变形隐患系数进行更新,得到更新的变形隐患系数;所述更新的变形隐患系数大于所述初始化变形隐患系数。7.根据权利要求5所述的方法,其特征在于,所述根据所述变形隐患建筑物节点组,确定所述差异值是否由所述第一建筑物引起,具体包括:确定所述第二建筑物节点不处于所述变形隐患建筑物节点组;若所述第一建筑物节点处于所述变形隐患建筑物节点组,则确定所述差异值由所述第一建筑物引起;若所述第一建筑物节点不处于所述变形隐患建筑物节点组,则在所述关系图谱中,确定所述第一建筑物节点的邻近建筑物节点;确定所述第一建筑物节点与所述邻近建筑物节点间的关联边的权重;将权重最大的邻近建筑物节点确定为第五建筑物节点,获取所述第五建筑物节点在预设时间段内的监测数据;若所述监测数据中包括变形类型数据,则确定所述差异值由所述第一建筑物引起。8.根据权利要求1所述的方法,其特征在于,所述根据所述第一遥感图像,生成所述第一建筑物的第一参数化三维建筑物数据,具体包括:根据预先构建的目标检测模型,对所述第一遥感图像进行目标检测,得到所述第一建筑物的三维建筑物点云;通过预先训练的建筑物关键点检测模型,对所述三维建筑物点云进行关键点检测,确定所述第一建筑物的关键点信息;根据所述关键点信息与所述三维建筑物点云,通过预先构建的拟合参数预测模型,确定重建所述第一建筑物时所需要的拟合参数;
根据所述拟合参数,对预设的三维参考建筑物网格进行拟合处理,确定所述第一建筑物的参数化三维建筑物数据;其中,所述参考建筑物网格中包含有多个顶点,所述多个顶点之间具有连接关系,且各所述顶点分别设置有建筑物语义。9.一种建筑物监测设备,其特征在于,包括:至少一个处理器;以及,与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够:通过遥感平台上的遥感传感器获取第一建筑物的第一遥感图像,根据所述第一遥感图像生成所述第一建筑物的第一参数化三维建筑物数据;在预设区域内,确定与所述第一建筑物距离最近的同一纬度的第二建筑物;通过所述遥感传感器获取所述第二建筑物的第二遥感图像,根据所述第二遥感图像生成所述第二建筑物的第二参数化三维建筑物数据;若所述第二建筑物为非新增建筑物,则根据所述第一参数化三维建筑物数据与所述第二参数化三维建筑物数据,生成所述第一建筑物与所述第二建筑物之间的第一相似度;获取所述第一建筑物对所述第二建筑物的历史相似度序列,在所述历史相似度序列中,选取距离当前时间最近的第二相似度;根据所述第一相似度与所述第二相似度,对所述第一建筑物和/或第二建筑物进行变形测量。10.一种建筑物测量非易失性计算机存储介质,存储有计算机可执行指令,其特征在于,所述计算机可执行指令设置为:通过遥感平台上的遥感传感器获取第一建筑物的第一遥感图像,根据所述第一遥感图像生成所述第一建筑物的第一参数化三维建筑物数据;在预设区域内,确定与所述第一建筑物距离最近的同一纬度的第二建筑物;通过所述遥感传感器获取所述第二建筑物的第二遥感图像,根据所述第二遥感图像生成所述第二建筑物的第二参数化三维建筑物数据;若所述第二建筑物为非新增建筑物,则根据所述第一参数化三维建筑物数据与所述第二参数化三维建筑物数据,生成所述第一建筑物与所述第二建筑物之间的第一相似度;获取所述第一建筑物对所述第二建筑物的历史相似度序列;在所述历史相似度序列中,选取距离当前时间最近的第二相似度;根据所述第一相似度与所述第二相似度,对所述第一建筑物和/或第二建筑物进行变形测量。
技术总结
本申请公开了一种建筑物监测方法、设备及介质,属于测量技术领域,用于解决周期性地对区域的建筑物进行变形测量时,效率与准确率低的问题,方法包括:获取第一建筑物的第一遥感图像,生成第一参数化三维建筑物数据;预设区域内,确定与第一建筑物距离最近的同一纬度的第二建筑物;获取第二建筑物的第二遥感图像,生成第二参数化三维建筑物数据;若第二建筑物为非新增建筑物,根据第一参数化三维建筑物数据与第二参数化三维建筑物数据,生成第一建筑物与第二建筑物之间的第一相似度;获取第一建筑物对第二建筑物的历史相似度序列,选取距离当前时间最近的第二相似度;根据第一相似度与第二相似度,对第一建筑物和/或第二建筑物进行变形测量。行变形测量。行变形测量。
技术研发人员:彭泓越
受保护的技术使用者:山东乾元泽孚科技股份有限公司
技术研发日:2022.10.12
技术公布日:2022/11/8
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。