技术特征:
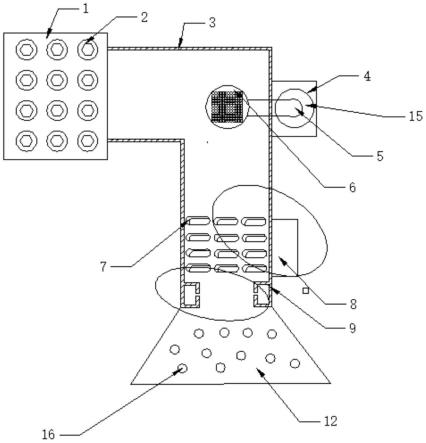
1.一种数控机器人机械臂智能钻孔装备,其特征在于,包括底座(1),所述底座(1)的顶部安装有由驱动电机驱动的转盘(2),所述转盘(2)的顶部固定安装有旋转臂(3),所述旋转臂(3)上固定安装有伸缩臂一(4),所述伸缩臂一(4)内滑动连接有伸缩板(5),所述伸缩板(5)的端部固定安装有伸缩臂二(6),所述伸缩臂二(6)与伸缩臂一(4)垂直设置,所述伸缩臂二(6)的内部滑动连接有推板,推板的端部固定安装有钻头电机(7),所述钻头电机(7)的输出轴上固定安装有钻头(8)。2.根据权利要求1所述的一种数控机器人机械臂智能钻孔装备,其特征在于,所述伸缩臂一(4)和伸缩臂二(6)均包括电机和丝杆,电机驱动丝杆转动,丝杆带动伸缩板(5)或推板移动。3.根据权利要求1所述的一种数控机器人机械臂智能钻孔装备,其特征在于,所述伸缩臂一(4)的底部固定安装有支撑板(10),所述支撑板(10)与底座(1)上开设的弧形槽(11)滑动连接,所述弧形槽(11)的圆心与转盘(2)的圆心相同。4.根据权利要求3所述的一种数控机器人机械臂智能钻孔装备,其特征在于,所述支撑板(10)上开设有凹槽(18),所述凹槽(18)内设置有滑块(17),所述滑块(17)上活动连接有支撑杆(9),所述支撑杆(9)的另一端与伸缩板(5)的底部活动连接。5.根据权利要求1所述的一种数控机器人机械臂智能钻孔装备,其特征在于,所述底座(1)上呈四边形设置有多个放置台(12),所述放置台(12)的顶部一端设置有呈三棱锥形的支撑部(16),所述支撑部(16)的一侧固定安装有弹簧二,弹簧二的一侧设置有挤压部(15)。6.根据权利要求5所述的一种数控机器人机械臂智能钻孔装备,其特征在于,所述放置台(12)的顶部另一端设置有三角放置部(13),所述三角放置部(13)的顶部固定安装有弹簧一(14)。
技术总结
本实用新型公开了一种数控机器人机械臂智能钻孔装备,包括底座,所述底座的顶部安装有由驱动电机驱动的转盘,所述转盘的顶部固定安装有旋转臂,所述旋转臂上固定安装有伸缩臂一,所述伸缩臂一内滑动连接有伸缩板,所述伸缩板的端部固定安装有伸缩臂二,所述伸缩臂二与伸缩臂一垂直设置。本实用新型通过旋转臂和伸缩臂等结构的设置,可以带动钻头旋转、水平方向移动和竖直方向的移动,使其钻孔的范围更广,更加容易调节,实用性强,可以对不同形状的板材进行钻孔,不仅仅局限单一形状的板材,同时可以钻弧形孔,不仅仅局限于钻出通孔。不仅仅局限于钻出通孔。不仅仅局限于钻出通孔。
技术研发人员:施文斌 时礼平 李蒙
受保护的技术使用者:安徽工业大学芜湖技术创新研究院
技术研发日:2022.04.08
技术公布日:2022/11/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。