技术特征:
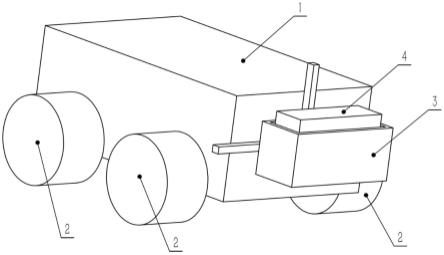
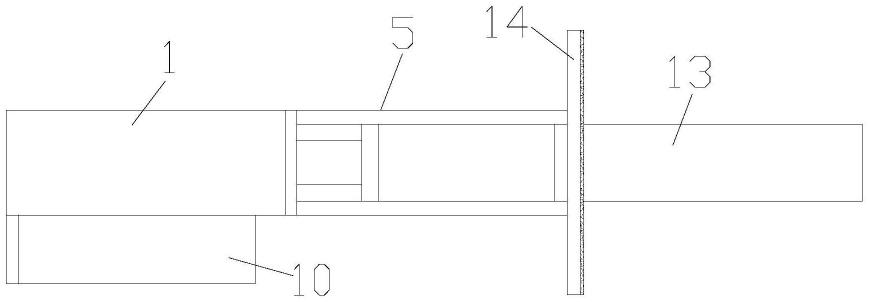
1.一种金属表面检测装置,其特征在于,包括:移动机器人,包括主体、车轮和吸附装置,所述车轮安装在所述主体上,所述吸附装置设置在所述车轮和主体之间,所述吸附装置与所述车轮的底部具有设定距离,所述移动机器人通过所述吸附装置和车轮在待检测金属表面吸附移动;二维平移机构,安装在所述主体的前端,所述二维平移机构上设置有多个测距仪;激光结构光视觉系统,安装在所述二维平移机构上,所述激光结构光视觉系统对所述待检测金属表面扫描并获取所述待检测金属表面的3d形貌信息;无线通信模块,与所述激光结构光视觉系统连接;以及远程控制计算机,与所述移动机器人、二维平移机构及激光结构光视觉系统连接。2.根据权利要求1所述的金属表面检测装置,其特征在于,所述主体为箱体结构,所述车轮为四个,四个所述车轮分别设置在所述箱体的两侧。3.根据权利要求2所述的金属表面检测装置,其特征在于,所述吸附装置为四个,四个所述吸附装置分别设置在每个所述车轮与箱体之间。4.根据权利要求1、2或3所述的金属表面检测装置,其特征在于,所述多个测距仪包括检测与所述待检测金属表面距离的距离测距仪和检测与前方障碍物距离的避障测距仪。5.根据权利要求1、2或3所述的金属表面检测装置,其特征在于,所述激光结构光视觉系统设置有用于避免外部光线对激光结构光视觉形成干扰的柔性挡光装置。6.根据权利要求1、2或3所述的金属表面检测装置,其特征在于,所述激光结构光视觉系统的激光为红外激光。7.根据权利要求1、2或3所述的金属表面检测装置,其特征在于,所述激光结构光视觉系统为双目式结构。8.根据权利要求1、2或3所述的金属表面检测装置,其特征在于,所述无线通信模块包括机器人端模块和计算机端模块,所述机器人端模块安装在所述主体上,所述机器人端模块的天线安装在所述主体的顶部,所述计算机端模块安装在所述远程控制计算机内。9.根据权利要求8所述的金属表面检测装置,其特征在于,所述机器人端模块内设置有图像无线传输模块,所述计算机端模块内设置有图像无线接收模块,所述图像无线传输模块将所述待检测金属表面的3d形貌信息传输至所述图像无线接收模块。10.根据权利要求8所述的金属表面检测装置,其特征在于,所述远程控制计算机内设置有控制模块和图像数据处理模块,所述控制模块分别与所述移动机器人、二维平移机构及激光结构光视觉系统,所述图像数据处理模块与所述图像无线接收模块连接,并对所述图像无线接收模块接收的所述待检测金属表面的3d形貌信息处理得到所述待检测金属表面的检测结果。
技术总结
一种金属表面检测装置,包括:移动机器人,包括主体、车轮和吸附装置,该车轮安装在该主体上,该吸附装置设置在该车轮和主体之间,该吸附装置与该车轮的底部具有设定距离,该移动机器人在待检测金属表面吸附移动;二维平移机构,安装在该主体的前端,该二维平移机构上设置有多个测距仪;激光结构光视觉系统,安装在该二维平移机构上,该激光结构光视觉系统对该待检测金属表面扫描并获取该待检测金属表面的3D形貌信息;无线通信模块,与该激光结构光视觉系统连接;以及远程控制计算机,与该移动机器人、二维平移机构及激光结构光视觉系统连接。本实用新型可满足大型装备生产使用中对于垂直表面的检测需求,安全、稳定、精确地检测金属表面。属表面。属表面。
技术研发人员:李敏 刘振国 黄及远 杨毅飞 沈毅 李晓会
受保护的技术使用者:北京机械工业自动化研究所有限公司
技术研发日:2022.04.22
技术公布日:2022/11/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。