技术特征:
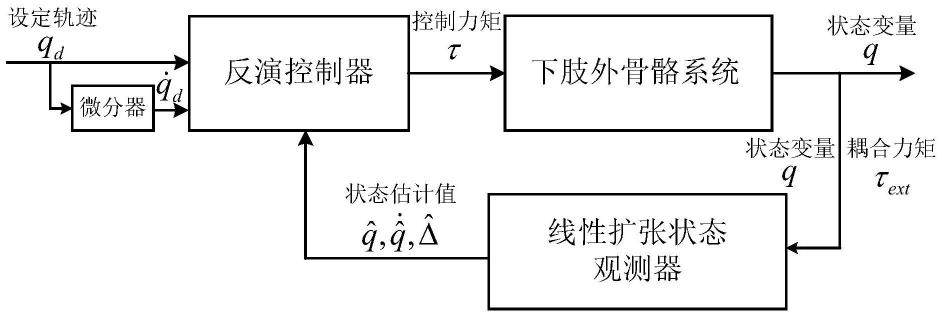
1.一种线性扩张观测器,其特征在于,所述扩张状态观测器根据输入的外骨骼双关节力矩τ以及关节位置q得到估计位置估计速度估计集总不确定性项2.根据权利要求1所述的一种线性扩张观测器,其特征在于,所述线型扩张观测器设计为:其中,是状态x的估计值,是状态x1的估计值,h是观测器增益,ω0是可调的观测器带宽。3.一种反演控制器,其特征在于,所述反演控制器根据理想输入的位置信息q
d
、微分得到的理想速度信息以及权利要求1或2所述线性扩张状态观测器输出的估计位置估计速度估计集总不确定性项计算得到外骨骼双关节的驱动力矩τ。4.根据权利要求3所述的一种反演控制器,其特征在于,基于线性扩张状态观测器的反演控制器设计为:其中,其中,是z2的估计值,z2为系统误差,是状态x2的估计值,β为虚拟控制量,量,是由参数辨识结果得到的动力学项,是由参数辨识结果得到的动力学项,是参数辨识误差的造成的偏差项,k1为正定矩阵。5.一种外骨骼装置,其特征在于,采用权利要求4所述的反演控制器进行电机驱动。
技术总结
本发明公开一种线性扩张观测器、反演控制器及外骨骼装置,应用于外骨骼机器人领域,针对现有技术因未测量的关节速度和集总不确定性,而导致的跟踪精度不高的问题;本发明设计一种基于线性扩张状态观测器来估计得到关节速度和集总不确定性;然后设计基于该观测器的反演控制器得到用于驱动下肢外骨骼的力矩;从而实现下肢外骨骼系统的稳定控制。从而实现下肢外骨骼系统的稳定控制。从而实现下肢外骨骼系统的稳定控制。
技术研发人员:陈振雷 郭庆 石岩 严尧 蒋丹 张继宇 寇建阁 许猛 李春
受保护的技术使用者:电子科技大学
技术研发日:2022.08.23
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。