技术特征:
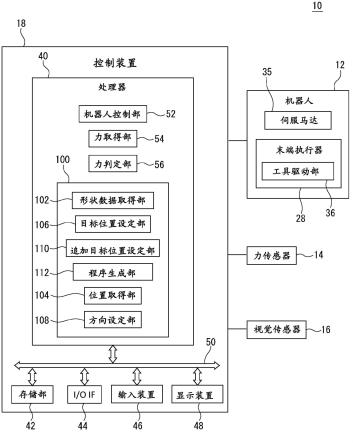
1.一种机器人的控制装置,其特征在于,所述控制装置具有:机器人控制部,其将所述机器人依次定位于根据表示工件的形状的形状数据而设定的多个目标位置,控制所述机器人沿着该工件的作业对象部位执行作业,在所述机器人到达与所述形状数据中的所述作业对象部位的终端对应地设定的最后的所述目标位置之后,所述机器人控制部控制所述机器人超过该最后的目标位置而继续所述作业。2.根据权利要求1所述的控制装置,其特征在于,所述控制装置还具有:存储部,其存储动作程序,该动作程序规定了所述多个目标位置和被设定于从所述最后的目标位置向规定的延长方向离开了规定的距离的位置的追加目标位置,所述机器人控制部按照所述动作程序使所述机器人进行动作,在该机器人到达所述最后的目标位置之后,继续所述作业直至所述追加目标位置。3.根据权利要求1或2所述的控制装置,其特征在于,所述机器人控制部通过相对于所述工件按压所述机器人的工具来执行所述作业,所述控制装置还具有:力取得部,其取得在所述机器人执行所述作业时从所述工件施加于所述机器人的力的数据;力判定部,其判定在超过所述最后的目标位置而继续所述作业的期间,所述力是否为预先决定的阈值以下。4.根据权利要求3所述的控制装置,其特征在于,在由所述力判定部判定为所述力为所述阈值以下的情况下,所述机器人控制部使所述作业结束。5.根据权利要求3所述的控制装置,其特征在于,所述机器人控制部在所述作业的执行中,根据所述力取得部取得的所述力,执行将所述机器人相对于所述工件按压所述工具的按压力控制为预先决定的目标值的仿形控制,在由所述力判定部判定为所述力为所述阈值以下的情况下,所述机器人控制部使所述仿形控制结束。6.根据权利要求1或2所述的控制装置,其特征在于,所述机器人控制部通过相对于所述工件按压所述机器人的工具来执行所述作业,所述控制装置还具有:移动量取得部,其在所述机器人执行所述作业时,取得所述机器人向相对于所述工件按压所述工具的方向的移动量;移动判定部,其判定在超过所述最后的目标位置而继续所述作业的期间,所述移动量是否超过预先决定的阈值。7.根据权利要求6所述的控制装置,其特征在于,在由所述移动判定部判定为所述移动量超过所述阈值的情况下,所述机器人控制部使所述作业结束。8.根据权利要求6所述的控制装置,其特征在于,
所述控制装置还具有:力取得部,其取得在所述机器人执行所述作业时从所述工件向所述机器人施加的力的数据,在所述作业的执行中,所述机器人控制部根据所述力取得部取得的所述力,执行将所述机器人相对于所述工件按压所述工具的按压力控制为预先决定的目标值的仿形控制,在由所述移动判定部判定为所述移动量超过所述阈值的情况下,所述机器人控制部使所述仿形控制结束。9.一种机器人系统,其特征在于,具有:机器人;以及权利要求1~8中任一项所述的控制装置。10.一种生成机器人的动作程序的装置,其特征在于,所述装置具有:形状数据取得部,其取得表示工件的形状的形状数据;目标位置设定部,其根据所述形状数据,设定为了针对所述工件的作业对象部位的作业而应依次定位所述机器人的多个目标位置;追加目标位置设定部,其在从与所述形状数据中的所述作业对象部位的终端对应地由所述目标位置设定部设定的最后的所述目标位置向规定的延长方向离开了规定的距离的位置,自动地设定追加目标位置;程序生成部,其生成规定了所述多个目标位置和所述追加目标位置的所述动作程序。11.根据权利要求10所述的装置,其特征在于,所述形状数据取得部取得视觉传感器拍摄到的所述工件的图像数据作为所述形状数据,所述视觉传感器相对于用于控制所述机器人的控制坐标系被配置成已知的位置关系,所述装置还具有:位置取得部,其根据所述图像数据来取得所述控制坐标系中的所述作业对象部位的位置,所述目标位置设定部根据所述位置取得部取得的所述作业对象部位的所述位置来设定所述多个目标位置。12.根据权利要求10或11所述的装置,其特征在于,所述装置还具有:方向设定部,其根据所述形状数据或所述目标位置来设定所述延长方向。13.一种机器人的控制方法,其特征在于,将所述机器人依次定位于根据表示工件的形状的形状数据而设定的多个目标位置,控制所述机器人沿着该工件的作业对象部位执行作业,在所述机器人到达与所述形状数据中的所述作业对象部位的终端对应地设定的最后的所述目标位置之后,控制所述机器人超过该最后的目标位置而继续所述作业。14.一种生成机器人的动作程序的方法,其特征在于,取得表示工件的形状的形状数据,根据所述形状数据,设定为了针对所述工件的作业对象部位的作业而应依次定位所述机器人的多个目标位置,在从与所述形状数据中的所述作业对象部位的终端对应地设定的最后的所述目标位置向规定的延长方向离开了规定的距离的位置,自动地设定追加目标位置,生成规定了所述多个目标位置和所述追加目标位置的所述动作程序。
技术总结
以往,存在相对于工件设定的机器人的目标位置从实际的工件偏离,无法完成作业直至工件的作业对象部位的终端的情况。机器人(12)的控制装置(18)具有:机器人控制部(52),其将机器人(12)依次定位于根据表示工件的形状的形状数据而设定的多个目标位置,控制机器人(12)沿着该工件的作业对象部位执行作业,在机器人(12)到达与形状数据中的作业对象部位的终端对应地设定的最后的目标位置后,该机器人控制部(52)控制机器人(12)超过该最后的目标位置而继续作业。而继续作业。而继续作业。
技术研发人员:石井优希 顾义华
受保护的技术使用者:发那科株式会社
技术研发日:2021.04.09
技术公布日:2022/11/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。