技术特征:
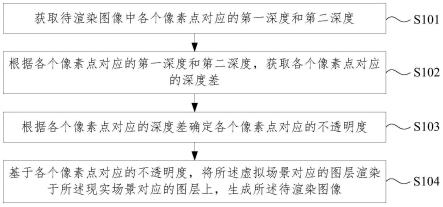
1.一种图像渲染方法,其特征在于,包括:获取待渲染图像中各个像素点对应的第一深度和第二深度;任一像素点对应的第一深度为标准化坐标系下该像素点对应的现实场景的深度,任一像素点对应的第二深度为标准化坐标系下该像素点对应的虚拟场景的深度;根据各个像素点对应的第一深度和第二深度,获取各个像素点对应的深度差,任一像素点对应的深度差为相机坐标系下该像素点对应的现实场景的深度与虚拟场景的深度的差值;根据各个像素点对应的深度差确定各个像素点对应的不透明度;其中,各个像素点对应的深度差与各个像素点对应的不透明度正相关;基于各个像素点对应的不透明度,将所述虚拟场景对应的图层渲染于所述现实场景对应的图层上,生成所述待渲染图像。2.根据权利要求1所述的方法,其特征在于,所述根据各个像素点对应的第一深度和第二深度,获取各个像素点对应的深度差,包括:将各个像素点对应的第一深度转换为各个像素点对应的第三深度,任一像素点对应的第三深度为相机坐标系下该像素点对应的现实场景的深度;将各个像素点对应的第二深度转换为各个像素点对应的第四深度,任一像素点对应的第四深度为相机坐标系下该像素点对应的虚拟场景的深度;对各个像素点对应的第四深度与第三深度作差,获取各个像素点对应的深度差。3.根据权利要求2所述的方法,其特征在于,所述将各个像素点对应的第一深度转换为各个像素点对应的第三深度,包括:根据虚拟相机到视锥体的远平面的距离与虚拟相机到视锥体的近平面的距离,将各个像素点对应的第一深度转换为各个像素点对应的第三深度,其中,所述各个像素点对应的第一深度与各个像素点对应的第三深度成反比例。4.根据权利要求3所述的方法,其特征在于,根据虚拟相机到视锥体的远平面的距离与虚拟相机到视锥体的近平面的距离,将各个像素点对应的第一深度转换为各个像素点对应的第三深度,包括:获取各个像素点对应第一计算值,所述第一计算值为虚拟相机到视锥体的远平面的距离与虚拟相机到视锥体的近平面的距离的两倍;获取各个像素点对应第二计算值,所述第二计算值为虚拟相机到视锥体的远平面的距离与虚拟相机到视锥体的近平面的距离的差;获取各个像素点对应第三计算值,所述第三计算值为所述第二计算值与像素点对应的第一深度的乘积;获取各个像素点对应第四计算值,所述第四计算值为虚拟相机到视锥体的远平面的距离与虚拟相机到视锥体的近平面的距离的和;获取各个像素点对应第五计算值,所述第五计算值为所述第三计算值与所述第四计算值的差;获取各个像素点对应所述第一计算值与所述第五计算值的比值作为各个像素点对应的第三深度。5.根据权利要求2所述的方法,其特征在于,所述将各个像素点对应的第二深度转换为
各个像素点对应的第四深度,包括:根据虚拟相机到视锥体的远平面的距离与虚拟相机到视锥体的近平面的距离,将各个像素点对应的第二深度转换为各个像素点对应的第四深度,其中,所述各个像素点对应的第二深度与各个像素点对应的第四深度成反比例。6.根据权利要求5所述的方法,其特征在于,根据虚拟相机到视锥体的远平面的距离与虚拟相机到视锥体的近平面的距离,将各个像素点对应的第二深度转换为各个像素点对应的第四深度,包括:获取各个像素点对应第六计算值,所述第六计算值为虚拟相机到视锥体的远平面的距离与虚拟相机到视锥体的近平面的距离的两倍;获取各个像素点对应第七计算值,所述第七计算值为虚拟相机到视锥体的远平面的距离与虚拟相机到视锥体的近平面的距离的差;获取各个像素点对应第八计算值,所述第八计算值为所述第七计算值与像素点对应的第二深度的乘积;获取各个像素点对应第九计算值,所述第九计算值为虚拟相机到视锥体的远平面的距离与虚拟相机到视锥体的近平面的距离的和;获取各个像素点对应第十计算值,所述第十计算值为所述第八计算值与所述第九计算值的差;获取各个像素点对应所述第六计算值与所述第十计算值的比值作为各个像素点对应的第四深度。7.根据权利要求1所述的方法,其特征在于,所述根据各个像素点对应的深度差确定各个像素点对应的不透明度,包括:若第一像素点对应的深度差小于或等于0,则确定所述第一像素点对应的不透明度为0。8.根据权利要求1所述的方法,其特征在于,所述根据各个像素点对应的深度差确定各个像素点对应的不透明度,包括:若第二像素点对应的深度差大于0且小于预设阈值,则确定所述第二像素点对应的不透明度为所述第二像素点对应的深度差与所述预设阈值的比值。9.根据权利要求1所述的方法,其特征在于,所述根据各个像素点对应的深度差确定各个像素点对应的不透明度,包括:若第三像素点对应的深度差大于或等于所述预设阈值,则确定所述第三像素点对应的不透明度为100%。10.根据权利要求1-9任一项的方法,其特征在于,在获取待渲染图像中各个像素点对应的第一深度和第二深度之前,所述方法还包括:对预设场景进行图像采集,获取所述预设场景对应的图像数据;根据所述图像数据对所述预设场景进行三维重建,获取所述现实场景。11.一种图像渲染装置,其特征在于,包括:获取单元,用于获取待渲染图像中各个像素点对应的第一深度和第二深度;任一像素点对应的第一深度为标准化坐标系下该像素点对应的现实场景的深度,任一像素点对应的第二深度为标准化坐标系下该像素点对应的虚拟场景的深度;
计算单元,用于根据各个像素点对应的第一深度和第二深度,获取各个像素点对应的深度差,任一像素点对应的深度差为相机坐标系下该像素点对应的现实场景的深度与虚拟场景的深度的差值;处理单元,用于根据各个像素点对应的深度差确定各个像素点对应的不透明度;其中,各个像素点对应的深度差与各个像素点对应的不透明度正相关;渲染单元,用于基于各个像素点对应的不透明度,将所述虚拟场景对应的图层渲染于所述现实场景对应的图层上,生成所述待渲染图像。12.一种电子设备,其特征在于,包括:存储器和处理器,所述存储器用于存储计算机程序;所述处理器用于在执行计算机程序时,使得所述电子设备实现权利要求1-10任一项所述的图像渲染方法。13.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,当所述计算机程序被计算设备执行时,使得所述计算设备实现权利要求1-10任一项所述的图像渲染方法。14.一种计算机程序产品,其特征在于,当所述计算机程序产品在计算机上运行时,使得所述计算机实现权利要求1-8任一项所述的图像渲染方法。
技术总结
本公开实施例提供了一种图像渲染方法及装置,涉及增强现实技术领域。该方法包括:获取待渲染图像中各个像素点对应的第一深度和第二深度;像素点对应的第一深度为标准化坐标系下的现实场景的深度,像素点对应的第二深度为标准化坐标系下虚拟场景的深度;根据各个像素点对应的第一、第二深度,获取各个像素点对应的深度差,像素点对应的深度差为相机坐标系下现实场景与虚拟场景的深度的差值;根据各个像素点对应的深度差确定不透明度;其中,深度差与不透明度正相关;基于各个像素点对应的不透明度,将虚拟场景对应的图层渲染于现实场景对应的图层上,生成待渲染图像。本公开实施例用于解决虚拟场景与现实场景过渡非常突然,沉浸感较差的问题。感较差的问题。感较差的问题。
技术研发人员:吴金远 郭燚
受保护的技术使用者:北京字跳网络技术有限公司
技术研发日:2021.05.31
技术公布日:2022/12/1
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。