技术特征:
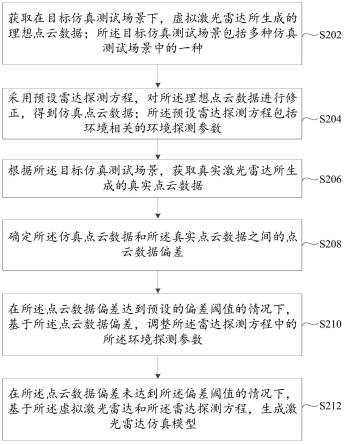
1.一种激光雷达仿真模型的生成方法,其特征在于,所述方法包括:获取在目标仿真测试场景下,虚拟激光雷达所生成的理想点云数据;所述目标仿真测试场景包括多种仿真测试场景中的一种;采用预设雷达探测方程,对所述理想点云数据进行修正,得到仿真点云数据;所述预设雷达探测方程包括环境相关的环境探测参数;根据所述目标仿真测试场景,获取真实激光雷达所生成的真实点云数据;确定所述仿真点云数据和所述真实点云数据之间的点云数据偏差;在所述点云数据偏差达到预设的偏差阈值的情况下,基于所述点云数据偏差,调整所述雷达探测方程中的所述环境探测参数;在所述点云数据偏差未达到所述偏差阈值的情况下,基于所述虚拟激光雷达和所述雷达探测方程,生成激光雷达仿真模型。2.根据权利要求1所述的方法,其特征在于,所述点云数据偏差包括点强度偏差、点数偏差和点位置偏差中的至少一项偏差。3.根据权利要求1所述的方法,其特征在于,所述环境探测参数包括目标物反射率参数、目标物散射参数和天气参数中的至少一种。4.根据权利要求1至3任一项所述的方法,其特征在于,在所述获取在目标仿真测试场景下,虚拟激光雷达所生成的理想点云数据之前,所述方法还包括:获取所述真实激光雷达的安装位置和安装姿态;根据所述安装位置和所述安装姿态,调整所述虚拟激光雷达的虚拟安装位置和虚拟安装姿态;采用调整后的所述虚拟激光雷达生成所述理想点云数据。5.根据权利要求1至3任一项所述的方法,其特征在于,根据所述目标仿真测试场景,获取真实激光雷达所生成的真实点云数据,包括:获取所述真实激光雷达的真实点云数据集;所述真实点云数据集包括多种真实测试场景下所述真实激光雷达所生成的点云数据;所述多种真实测试场景与所述多种仿真测试场景之间一一对应;根据所述目标仿真测试场景,从所述多种真实测试场景中确定目标真实测试场景;根据所述目标真实测试场景,对所述真实点云数据集进行预处理,得到所述真实点云数据。6.根据权利要求5所述的方法,其特征在于,所述预处理包括清洗、切片和时间对齐中的至少一种数据处理方式。7.根据权利要求1所述的方法,其特征在于,所述虚拟激光雷达包括光源数、视场角和分辨率中的至少一项特征参数。8.根据权利要求1所述的方法,其特征在于,所述虚拟激光雷达基于仿真引擎与光线追踪技术创建。9.一种激光雷达仿真模型的生成装置,其特征在于,所述装置包括:第一获取模块,用于获取在目标仿真测试场景下,虚拟激光雷达所生成的理想点云数据;所述目标仿真测试场景包括多种仿真测试场景中的一种;修正模块,用于采用预设雷达探测方程,对所述理想点云数据进行修正,得到仿真点云
数据;所述预设雷达探测方程包括环境相关的环境探测参数;第二获取模块,用于根据所述目标仿真测试场景,获取真实激光雷达所生成的真实点云数据;确定模块,用于确定所述仿真点云数据和所述真实点云数据之间的点云数据偏差;第一调整模块,用于在所述点云数据偏差达到预设的偏差阈值的情况下,基于所述点云数据偏差,调整所述雷达探测方程中的所述环境探测参数;第一生成模块,用于在所述点云数据偏差未达到所述偏差阈值的情况下,基于所述虚拟激光雷达和所述雷达探测方程,生成激光雷达仿真模型。10.一种电子设备,其特征在于,所述电子设备包括处理器和存储器,所述存储器中存储有至少一条指令或至少一段程序,所述至少一条指令或所述至少一段程序由所述处理器加载并执行如权利要求1-8任一项所述的激光雷达仿真模型的生成方法。
技术总结
本申请涉及激光雷达技术领域,特别涉及一种激光雷达仿真模型的生成方法、装置及电子设备,该方法包括:获取在目标仿真测试场景下,虚拟激光雷达的理想点云数据;采用预设雷达探测方程,对理想点云数据进行修正,得到仿真点云数据;根据目标仿真测试场景,获取真实激光雷达的真实点云数据;确定仿真点云数据和真实点云数据之间的点云数据偏差;在点云数据偏差达到预设的偏差阈值的情况下,基于点云数据偏差,调整雷达探测方程中的环境探测参数;在点云数据偏差未达到偏差阈值的情况下,基于虚拟激光雷达和雷达探测方程,生成激光雷达仿真模型。提高激光雷达仿真模型的输出数据的精度、真实性,实现模型参数可视化调节,节约成本。节约成本。节约成本。
技术研发人员:王宗千 杨彦召 秦伟 杨欣雨 高奥 张钊彬
受保护的技术使用者:中汽创智科技有限公司
技术研发日:2022.09.26
技术公布日:2022/12/1
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。