技术特征:
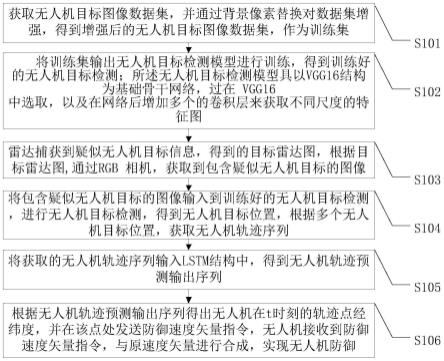
1.一种基于探测技术的无人机防御方法,其特征在于,包括如下步骤:获取无人机目标图像数据集,并通过背景像素替换对数据集增强,得到增强后的无人机目标图像数据集,作为训练集;将训练集输出无人机目标检测模型进行训练,得到训练好的无人机目标检测;所述无人机目标检测模型具以vgg16结构为基础骨干网络,过在vgg16中选取,以及在网络后增加多个的卷积层来获取不同尺度的特征图;雷达捕获到疑似无人机目标信息,得到的目标雷达图,根据目标雷达图,通过rgb相机,获取到包含疑似无人机目标的图像;将包含疑似无人机目标的图像输入到训练好的无人机目标检测,进行无人机目标检测,得到无人机目标位置,根据多个无人机目标位置,获取无人机轨迹序列;将获取的无人机轨迹序列输入lstm结构中,得到无人机轨迹预测输出序列;根据无人机轨迹预测输出序列得出无人机在t时刻的轨迹点经纬度,并在该点处发送防御速度矢量指令,无人机接收到防御速度矢量指令,与原速度矢量进行合成,实现无人机防御。2.根据权利要求1所述的一种基于探测技术的无人机防御方法,其特征在于,获取无人机目标图像数据集,并通过背景像素替换对数据集增强,所述背景像素替换具体为:首先从包含无人机目标的图像中提取无人机目标,再根据不含无人机目标的天空背景像素进行背景像素替换,并随机旋转一定角度,通过高斯滤波方法对图像进行平滑,得到新的数据集。3.根据权利要求1所述的一种基于探测技术的无人机防御方法,其特征在于,将训练集输出无人机目标检测模型进行训练,其中损失函数包括定位损失函数和分类损失函数,具体为:体为:体为:体为:体为:其中,是第i个预测框与第j个真实框关于类别k是否匹配,值为0或1;是预测框位置与大小;是真实框位置与大小;是预测框与真实框关于类别p匹配;是类别为p的
预测值,n为预测框的个数,cx预测框起始点的横坐标,cy预测框起始点的纵坐标,w预测框的宽,h预测框的高;m取值为cx、cy、w、h。4.根据权利要求1所述的一种基于探测技术的无人机防御方法,其特征在于,所述将获取的无人机轨迹序列输入lstm结构中,得到无人机轨迹预测输出序列,具体包括:将时刻t无人机轨迹序列输入lstm结构中,通过sigmoid函数进行处理,结合上一时间节点中lstm单元的输出,以及当前时间节点的输入值,通过设定的输入门的权重参数矩阵,并加上输入门的阈值;遗忘门将时刻t无人机轨迹序列作为输入,加上上一时刻隐藏层的输出;输出层接收来自隐藏层训练产生的数据,得到无人机轨迹预测输出序列。5.一种基于探测技术的无人机防御系统,其特征在于,包括如下:训练集获取单元:训练集获取单元获取无人机目标图像数据集,并通过背景像素替换对数据集增强,得到增强后的无人机目标图像数据集,作为训练集;模型训练单元:将训练集输出无人机目标检测模型进行训练,得到训练好的无人机目标检测;所述无人机目标检测模型具以vgg16结构为基础骨干网络,过在vgg16中选取,以及在网络后增加多个的卷积层来获取不同尺度的特征图;检测图像获取单元:雷达捕获到疑似无人机目标信息,得到的目标雷达图,根据目标雷达图,通过rgb相机,获取到包含疑似无人机目标的图像;轨迹序列获取单元:将包含疑似无人机目标的图像输入到训练好的无人机目标检测,进行无人机目标检测,得到无人机目标位置,根据多个无人机目标位置,获取无人机轨迹序列;轨迹预测单元:将获取的无人机轨迹序列输入lstm结构中,得到无人机轨迹预测输出序列;防御单元:根据无人机轨迹预测输出序列得出无人机在t时刻的轨迹点经纬度,并在该点处发送防御速度矢量指令,无人机接收到防御速度矢量指令,与原速度矢量进行合成,实现无人机防御。6.根据权利要求1所述的一种基于探测技术的无人机防御系统,其特征在于,所述训练集获取单元中,获取无人机目标图像数据集,并通过背景像素替换对数据集增强,所述背景像素替换具体为:首先从包含无人机目标的图像中提取无人机目标,再根据不含无人机目标的天空背景像素进行背景像素替换,并随机旋转一定角度,通过高斯滤波方法对图像进行平滑,得到新的数据集。7.根据权利要求1所述的一种基于探测技术的无人机防御系统,其特征在于,所述模型训练单元中,将训练集输出无人机目标检测模型进行训练,其中损失函数包括定位损失函数和分类损失函数,具体为:数和分类损失函数,具体为:
其中,是第i个预测框与第j个真实框关于类别k是否匹配,值为0或1;是预测框位置与大小;是真实框位置与大小;是预测框与真实框关于类别p匹配;是类别为p的预测值,n为预测框的个数,cx预测框起始点的横坐标,cy预测框起始点的纵坐标,w预测框的宽,h预测框的高;m取值为cx、cy、w、h。8.根据权利要求1所述的一种基于探测技术的无人机防御系统,其特征在于,所述轨迹预测单元中,将获取的无人机轨迹序列输入lstm结构中,得到无人机轨迹预测输出序列,具体包括:将时刻t无人机轨迹序列输入lstm结构中,通过sigmoid函数进行处理,结合上一时间节点中lstm单元的输出,以及当前时间节点的输入值,通过设定的输入门的权重参数矩阵,并加上输入门的阈值;遗忘门将时刻t无人机轨迹序列作为输入,加上上一时刻隐藏层的输出;输出层接收来自隐藏层训练产生的数据,得到无人机轨迹预测输出序列。9.一种电子设备,其特征在于,包括:存储器,处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其中,所述处理器执行所述计算机程序时实现权利要求1至4任一所述的方法步骤。10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现权利要求1-4任一所述的方法步骤。
技术总结
本发明提供一种基于探测技术的无人机防御方法,本发明提供了一种基于探测技术的无人机防御方法,包括:获取无人机目标图像数据集,作为训练集;将训练集输出无人机目标检测模型进行训练,得到训练好的无人机目标检测;获取到包含疑似无人机目标的图像;将包含疑似无人机目标的图像输入到训练好的无人机目标检测,进行无人机目标检测,获取无人机轨迹序列;将获取的无人机轨迹序列输入LSTM结构中,得到无人机轨迹预测输出序列;根据无人机轨迹预测输出序列得出无人机在t时刻的轨迹点经纬度,并在该点处发送防御速度矢量指令,实现无人机防御;本发明方法实现了无人机目标图像采集、检测,预测未来的轨迹,根据预测的轨迹实现防御,精准且高效。精准且高效。精准且高效。
技术研发人员:折永刚 李春艳 折云岗 王宇 李伟
受保护的技术使用者:鄂尔多斯市视达科技有限公司
技术研发日:2022.09.06
技术公布日:2022/12/1
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。