技术特征:
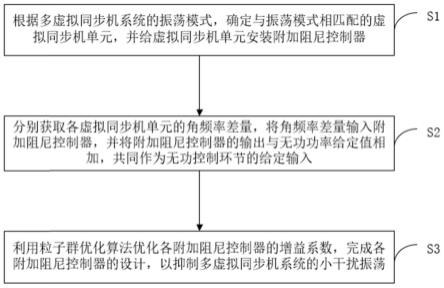
1.一种多虚拟同步机系统的小干扰振荡抑制方法,其特征在于,包括:步骤1:根据所述多虚拟同步机系统的振荡模式,确定与振荡模式相匹配的虚拟同步机单元,并给所述虚拟同步机单元安装附加阻尼控制器;步骤2:分别获取各所述虚拟同步机单元的角频率差量,将所述角频率差量输入所述附加阻尼控制器,并将所述附加阻尼控制器的输出与无功功率给定值相加,共同作为无功控制环节的给定输入;步骤3:利用粒子群优化算法优化各所述附加阻尼控制器的增益系数,完成各所述附加阻尼控制器的设计,以抑制所述多虚拟同步机系统的小干扰振荡。2.根据权利要求1所述的方法,其特征在于,所述步骤1包括:设所述多虚拟同步机系统具有k个振荡模式,针对每个振荡模式,分别计算所述振荡模式下所有所述虚拟同步机单元的留数指标,为最大的留数指标对应的虚拟同步机单元安装附加阻尼控制器;其中,安装附加阻尼控制器的所述虚拟同步机单元用于控制所述振荡模式。3.根据权利要求2所述的方法,其特征在于,所述留数指标的计算公式为:其中,表示多虚拟同步机系统中第i个虚拟同步机单元对应第k个振荡模式的留数指标;和分别为第i个虚拟同步机单元对应第k个振荡模式的可控性和可观性。4.根据权利要求1所述的方法,其特征在于,所述角频率差量的计算公式为:δω
i
=w
g-w
i
其中,δω
i
为第i个虚拟同步机单元对应的角频率差量,w
g
为电网角频率,w
i
为第i个虚拟同步机单元内的电势角频率。5.根据权利要求1所述的方法,其特征在于,所述步骤3包括:步骤31:附加阻尼控制器采用超前滞后环节;步骤32:采用状态空间方法,求解所述多虚拟同步机系统的特征根分布;步骤33:建立所述多虚拟同步机系统中各虚拟同步机单元的留数指标和附加阻尼控制器之间的传递函数;步骤34:利用极点配置方法,根据所述传递函数确定振荡频率附近的相位特性,得到所述附加阻尼控制器的补偿相位角度,从而确定附加阻尼控制器的时间常数;步骤35:基于所述时间常数和超前滞后环节的表达式,利用粒子群优化算法求解优化问题,输出增益系数。6.根据权利要求5所述的方法,其特征在于,所述超前滞后环节的表达式为:其中,t
pss
(s)为附加阻尼控制器传递函数;k
pss
为附加阻尼控制器增益系数;t1、t2、t3和t4分别为附加阻尼控制器的时间常数;s为拉普拉斯算子。7.根据权利要求6所述的方法,其特征在于,在所述步骤35中:所述优化问题的优化目标f(p)和约束条件sub分别为:
其中,k
pssi
是通过算法优化计算得到的第i个附加阻尼控制器的增益系数;ξ
i
和ω
i
分别是振荡模式特征根的实部和虚部;σ*为预设阻尼比,σ*=0.1;l代表虚拟同步机单元的集合。
技术总结
本发明公开了一种多虚拟同步机系统的小干扰振荡抑制方法,其包括:根据多虚拟同步机系统的振荡模式,确定与振荡模式相匹配的虚拟同步机单元,并给虚拟同步机单元安装附加阻尼控制器;分别获取各虚拟同步机单元的角频率差量,将角频率差量输入附加阻尼控制器,并将附加阻尼控制器的输出与无功功率给定值相加,共同作为无功控制环节的给定输入;利用粒子群优化算法优化各附加阻尼控制器的增益系数,完成各附加阻尼控制器的设计,以抑制多虚拟同步机系统的小干扰振荡。本发明不仅有效提高多虚拟同步机系统小干扰稳定性,实现系统小干扰振荡抑制;而且所附加阻尼控制器以增益系数最小为优化目标,保证了该附加控制对系统原始功率控制影响最小。制影响最小。制影响最小。
技术研发人员:刘育明 徐瑞林 姚骏 李登峰 李小菊 夏翰林 孙鹏 杨旼才 黄森 詹航 司萌 李媛 李寒江 蒋望 余霞 李俊杰
受保护的技术使用者:国网重庆市电力公司 国家电网有限公司 重庆大学
技术研发日:2022.09.21
技术公布日:2022/12/9
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。