技术特征:
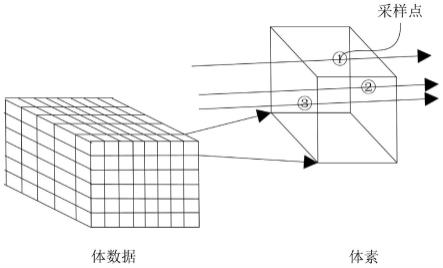
1.一种神经外科手术中导航加速处理方法,其特征在于,所述方法包括以下步骤:步骤1,获取cpu利用率及gpu空闲内存,若cpu利用率大于第三阈值且gpu空闲内存大于体数据大小,则在gpu上执行步骤2,否则在cpu上执行步骤2;所述第三阈值与所述像素点个数反相关;步骤2,获取待成像平面的像素点个数,由每个像素点沿着视线方向发出一条投影射线,在投影射线上按照预设方式采集体数据上k个采样点,将位于同一个体素的采样点归作为一个采样点分组;步骤3,根据所述采样点分组个数,设置grid中包括的block个数m,以及每个block包括的线程个数n,将所述采样点分组分配给m*n个线程,根据gpu中每个sm的负载将block分配给sm;block中的gpu线程通过三线性插值方法计算每个采样点的颜色值和透明度;步骤4,由cpu根据所述每个采样点的颜色值和透明度得到所述待成像平面上每个像素点的值。2.如权利要求1所述的方法,其特征在于,所述在投影射线上按照预设方式采集体数据上k个采样点,具体为:获取gpu的负载r,若所述gpu的负载小于等于第一阈值r
t
且旋转三维图像的频率小于第二阈值,则以第一个采样点为原点,每隔l
r
的距离采样一次;否则,以第一个采样点为原点,按照下式计算距离前一个采样点的距离:其中,k为正整数。3.如权利要求2所述的方法,其特征在于,所述在投影射线上按照预设方式采集体数据上k个采样点,还包括:若旋转后预设值时间内没有旋转三维图像,则在gpu的负载小于等于第一阈值时,则第一个采样点为原点,每隔l
r
的距离采样一次,重新计算每个像素点的值。4.如权利要求1所述的方法,其特征在于,所述根据所述采样点分组个数,设置grid中包括的block个数m,以及每个block包括的线程个数n,具体为:设n=32j,计算出j、m使得32j*m大于且最接近采样点分组个数;所述j=1、2、...、16,m为正整数。5.如权利要求4所述的方法,其特征在于,所述根据gpu中每个sm的负载将block分配给sm,具体为:计算每个block待计算量,所述待计算量其中n为block包括的线程个数,z表示与线程对应的采样点分组所包括的采样点个数;按照每个block待计算量对block从大到小的顺序排序得到block序列,并按照sm的负载从小到大的顺序进行排序得到sm序列,每次将block序列的第一个block分配给sm序列的第一个,然后重新对sm排序,再将block序列的第一个block分配给sm序列的第一个,依次类推,直到block序列中的block全部分给sm。6.如权利要求1-5任一项所述的方法,其特征在于,在所述按照预设方式采集体数据上k个采样点前,先对体数据进行预处理,所述预处理至少包括滤波、去噪。7.一种神经外科手术中导航加速处理设备,所述设备至少包括处理器cpu、存储器、
gpu,其特征在于,所述设备还包括以下模块:判断模块,用于获取cpu利用率及gpu空闲内存,若cpu利用率大于第三阈值且gpu空闲内存大于体数据大小,则在gpu上执行所述采集模块,否则在cpu上执行所述采集模块;所述第三阈值与所述像素点个数反相关;采样模块,用于获取待成像平面的像素点个数,由每个像素点沿着视线方向发出一条投影射线,在投影射线上按照预设方式采集体数据上k个采样点,将位于同一个体素的采样点归作为一个采样点分组;gpu并行计算模块,用于根据所述采样点分组个数,设置grid中包括的block个数m,以及每个block包括的线程个数n,将所述采样点分组分配给m*n个线程,根据gpu中每个sm的负载将block分配给sm;block中的gpu线程通过三线性插值方法计算每个采样点的颜色值和透明度;平面成像模块,用于由cpu根据所述每个采样点的颜色值和透明度得到所述待成像平面上每个像素点的值。8.如权利要求7所述的设备,其特征在于,所述在投影射线上按照预设方式采集体数据上k个采样点,具体为:获取gpu的负载r,若所述gpu的负载小于等于第一阈值r
t
且旋转三维图像的频率小于第二阈值,则以第一个采样点为原点,每隔l
r
的距离采样一次;否则,以第一个采样点为原点,按照下式计算距离前一个采样点的距离:其中,k为正整数。9.如权利要求7-8任一项所述的方法,其特征在于,所述设备连接定位仪、探针和显示设备。
技术总结
本发明提供了一种神经外科手术中导航加速处理方法及设备,获取待成像平面的像素点个数,由每个像素点沿着视线方向发出一条投影射线,在投影射线上按照预设方式采集体数据上k个采样点,将位于同一个体素的采样点归作为一个采样点分组;然后,根据所述采样点分组个数,设置Grid中包括的Block个数m,以及每个Block包括的线程个数n,将所述采样点分组分配给m*n个线程,根据GPU中每个SM的负载将Block分配给SM;Block中的GPU线程通过三线性插值方法计算每个采样点的颜色值和透明度;由CPU根据所述每个采样点的颜色值和透明度得到所述待成像平面上每个像素点的值。本发明提高了神经外科导航系统中三维可视化的速度。导航系统中三维可视化的速度。导航系统中三维可视化的速度。
技术研发人员:郭孟果
受保护的技术使用者:郑州大学第一附属医院
技术研发日:2022.10.13
技术公布日:2022/12/9
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。