技术特征:
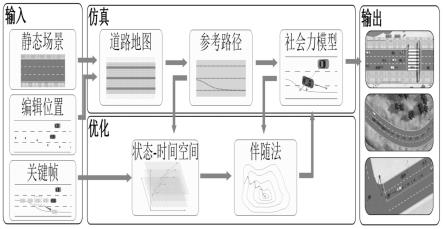
1.一种基于时-空关键帧控制的交通仿真方法,其特征在于,包括:步骤1、获取原始交通仿真数据,所述原始交通仿真数据包括用户编辑信息,参考路径以及基于所述参考路径的交通场景仿真结果;步骤2、基于所述参考路径构建三维网格化的状态-时间空间图,计算所述状态-时间空间图中所有节点对应的可连接子节点,获得对应的状态-时间有向图;步骤3、提取所述用户编辑信息中的关键帧并设为编辑起点进行搜索,以状态-时间有向图为基础构建目标函数为最小值的轨迹价值函数,求解所述轨迹价值函数获得由多个状态-时间有向图节点构成的粗粒度轨迹;步骤4、提取所述粗粒度轨迹对应的轨迹沿途预期速度集合作为待优化初始值,基于所述待优化初始值对所述交通场景仿真结果进行细粒度优化,获得满足时-空关键帧控制的交通场景仿真轨迹。2.根据权利要求1所述的基于时-空关键帧控制的交通仿真方法,其特征在于,步骤1中,所述交通场景仿真结果的获取过程如下:步骤1-1、根据待仿真的交通场景道路信息,构建二维网格化的道路地图,所述道路地图包括不可行驶区域、可行驶区域以及车道中心区域;步骤1-2、根据用户编辑信息中的编辑位置作为编辑起点进行搜索,以道路地图为基础构建目标函数为最小值的路径价值函数,求解获得用户的参考路径;步骤1-3、基于社会力模型计算所述参考路径中车辆的受力情况,同时在笛卡尔坐标系和frenet坐标系中更新所述车辆状态,获得交通场景仿真结果。3.根据权利要求1或2所述的基于时-空关键帧控制的交通仿真方法,其特征在于,所述搜索采用a*算法,具体过程如下:首先确定作为起点的编辑起点和作为终点的编辑终点,然后重复将所述价值函数估价最小的网格节点的相邻节点加入到当前图节点集合,直至所述编辑终点被添加至当前图节点集合,回溯得到用户自定义轨迹。4.根据权利要求2所述的基于时-空关键帧控制的交通仿真方法,其特征在于,步骤1-2中,所述路径价值函数的表达式如下:其中,n为搜索过程的当前网络节点,n
goal
为编辑终点,‖n-n
goal
‖表示当前网格节点和编辑终点间的距离度量;μ
a
和μ
b
为预设参数,sign为当前网格节点n的标识变量,表示当前网络节点与车道中心间的距离度量。5.根据权利要求1所述的基于时-空关键帧控制的交通仿真方法,其特征在于,步骤2中,所述状态-时间有向图由离散的状态-时间空间节点,加速后到达子节点,匀速后达到子节点以及减速后达到子节点连接构成。6.根据权利要求1所述的基于时-空关键帧控制的交通仿真方法,其特征在于,步骤3中,所述轨迹价值函数的表达式如下:
其中,ω
d
和ω
a
为预设参数,为状态-时间有向图中的网格节点,为的父节点中的速度分量,为作为终点的编辑终点,为与编辑终点之间的距离度量,为与对应父节点之间的速度变化度量。7.根据权利要求1所述的基于时-空关键帧控制的交通仿真方法,其特征在于,步骤4中,所述细粒度优化采用社会力模型与伴随法,其具体过程如下:基于所述待优化初始值通过社会力模型生成一段细粒度轨迹,并将所述细粒度轨迹与关键帧进行比较,使用伴随法计算得到预期速度集合的梯度,同时进行梯度下降更新预期速度集合,然后重复使用新的预期速度集合和所述社会力模型不断生成新的细粒度轨迹,直至达到最大预设重复次数。8.根据权利要求7所述的基于时-空关键帧控制的交通仿真方法,其特征在于,所述伴随法的目标函数表达式如下:随法的目标函数表达式如下:其中,ω
t
,ω
v
为预设参数,t
o
为利用待优化初始值生成的细粒度轨迹,为预期速度集合,q
t
为t时刻下的关键帧,g为车辆状态更新表达式,t
o,t
=[s,v
s
]|
t
为t时刻下轨迹t
o
包含的该车辆状态。9.根据权利要求7所述的基于时-空关键帧控制的交通仿真方法,其特征在于,所述伴随法的梯度计算表达式如下:其中,φ为该车辆的行驶方向与该车辆指向相邻车辆j的方向之间的夹角,v为预期速度集合,g为车辆状态更新表达式,为t时刻的预期速度,λ
t
为t时刻下的伴随状态。10.一种交通仿真装置,其特征在于,包括存储器和一个或多个处理器,所述存储器中存储有可执行代码,所述一个或多个处理器执行所述可执行代码时,用于实现权利要求1-9任一所述的基于时-空关键帧控制的交通仿真方法,其具体步骤如下:获取原始交通仿真数据,通过所述交通仿真方法进行优化,输出满足时-空关键帧控制的交通场景仿真轨迹。
技术总结
本发明公开了一种基于时-空关键帧控制的交通仿真方法,包括:步骤1、获取原始交通仿真数据与用户编辑信息中的关键帧;步骤2、沿车辆参考路径构建三维网格化的状态-时间空间图,计算获得对应的状态-时间有向图;步骤3、以状态-时间有向图为基础构建目标函数为最小值的轨迹价值函数,求解所述轨迹价值函数获得由多个状态-时间有向图节点构成的粗粒度轨迹;步骤4、提取所述粗粒度轨迹对应的轨迹沿途预期速度集合作为待优化初始值,基于所述待优化初始值对所述交通场景仿真结果进行细粒度优化,获得满足约束控制的交通场景仿真轨迹。本发明还提供了一种交通仿真装置。本发明方法可实现交通仿真轨迹的灵活控制,同时保证仿真结果的真实性。真实性。真实性。
技术研发人员:韩逸 金小刚
受保护的技术使用者:浙江大学
技术研发日:2022.08.31
技术公布日:2022/12/19
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。