技术特征:
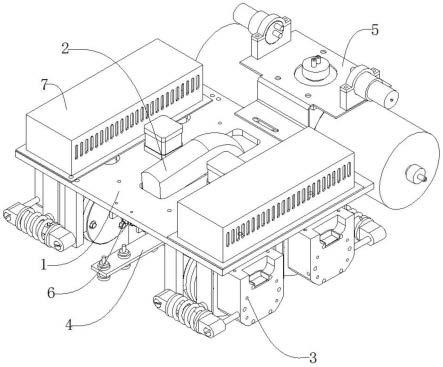
1.一种焊缝检测爬壁机器人,其特征在于包括顶板、探伤机构、磁轮机构、传感器组件、供液机构、重力反馈机构、控制器,所述的探伤机构位于顶板中心处,所述的探伤机构与顶板通过螺栓相连,所述磁轮机构位于顶板下端,所述的磁轮机构与顶板通过螺栓相连,所述磁轮机构的数量为4件,沿顶板的前后方向、左右方向对称布置,所述的传感器组件位于探伤机构下端,所述的传感器组件与探伤机构通过螺栓相连,所述的供液机构位于顶板外侧,所述的供液机构与顶板通过螺栓相连,所述的重力反馈机构位于顶板下端,所述的重力反馈机构与顶板通过螺栓相连,所述的控制器固定于顶板上端。2.如权利要求1所述的焊缝检测爬壁机器人,其特征在于所述的探伤机构还包括第一伺服电机、滚珠丝杠、进给螺母、浮动夹板机构、磁粉探伤仪,所述第一伺服电机数量为2件,对称布置于顶板上端,所述的滚珠丝杠位于第一伺服电机下端且贯穿顶板,所述的滚珠丝杠与第一伺服电机通过螺栓相连,所述的进给螺母被滚珠丝杠贯穿,所述的进给螺母与滚珠丝杠螺纹相连,所述的浮动夹板机构位于进给螺母下端,所述的浮动夹板机构与进给螺母螺纹相连,所述的磁粉探伤仪贯穿浮动夹板机构。3.如权利要求2所述的焊缝检测爬壁机器人,其特征在于所述的浮动夹板机构还包括浮动板、固定销、上夹板、下夹板、上弹簧、下弹簧,所述的浮动板位于进给螺母下端,所述的浮动板与进给螺母通过螺栓相连,所述的固定销数量为4件,沿浮动板对称布置,所述浮动板沿固定销上下滑动,所述的上夹板位于固定销上端,所述的上夹板与固定销过盈配合相连,所述的下夹板位于固定销下端,所述的下夹板与固定销间隙配合相连,所述的下夹板与上夹板通过螺栓相连,所述的上弹簧位于固定销外侧且位于浮动板与上夹板之间,所述的下弹簧位于固定销外侧且位于浮动板与下夹板之间。4.如权利要求3所述的焊缝检测爬壁机器人,其特征在于所述的磁轮机构还包括偏转机构、第二伺服电机、法兰、第一环形轭铁、永磁铁、第二环形轭铁、磁轮约束、连接螺栓、辅助支撑柱、弹性机构,所述的偏转机构位于顶板下端,所述的偏转机构与顶板通过螺栓相连,所述的第二伺服电机位于偏转机构的右侧,所述的第二伺服电机与偏转机构通过螺栓相连,所述的法兰位于偏转机构的左侧且位于第二伺服电机的左侧,所述的法兰与第二伺服电机通过螺栓相连,所述的第一环形轭铁、永磁铁、第二环形轭铁、磁轮约束沿法兰的轴线方向自右向左依次布置,所述的连接螺栓自左向右依次贯穿磁轮约束、第二环形轭铁、永磁铁、第一环形轭铁和法兰,所述的连接螺栓与法兰螺纹相连,所述的辅助支撑柱位于顶板下端,所述的辅助支撑柱与顶板通过螺栓相连,所述弹性机构位于辅助支撑柱下端,所述的弹性机构分别与辅助支撑柱和第二伺服电机通过螺栓相连,所述的永磁铁沿厚度方向充磁,所述的第一环形轭铁和第二环形轭铁的材质为电工纯铁。5.如权利要求4所述的焊缝检测爬壁机器人,其特征在于所述的偏转机构还包括u型支架、转动螺钉、电机前盖,所述的u型支架位于顶板下端,所述的u型支架与顶板通过螺栓相连,所述的转动螺钉数量为2件,对称布置于u型支架下端,所述的转动螺钉与u型支架间隙配合相连,所述的电机前盖位于u型支架内侧且位于第二伺服电机左侧,所述的电机前盖与转动螺钉螺纹相连且与第二伺服电机通过螺栓相连。6.如权利要求5所述的焊缝检测爬壁机器人,其特征在于所述的弹性机构还包括左固定块、右固定块、导杆、导套、第一弹簧,所述的左固定块位于辅助支撑柱下端,所述的左固定块与辅助支撑柱通过螺栓相连,所述的右固定块位于第二伺服电机下端,所述的右固定
块与第二伺服电机通过螺栓相连,所述的导杆位于左固定块右侧,所述的导杆与左固定块螺纹相连,所述的导套位于右固定块左侧且位于导杆外侧,所述的导套与右固定块一体相连且与导杆间隙配合相连,所述的第一弹簧套装于导套和导杆的外侧。7.如权利要求6所述的焊缝检测爬壁机器人,其特征在于所述的传感器组件还包括横板、喷头、工业相机,所述的横板位于下夹板的下端,所述的横板与下夹板通过螺栓相连,所述的喷头数量为2件,安装于横板的右侧,所述的喷头为扇形喷头,所述的喷头与供液机构通过软管相连,所述的工业相机安装于横板中部。8.如权利要求7所述的焊缝检测爬壁机器人,其特征在于所述的供液机构还包括连接板、水箱、供液头、进液头、水泵,所述的连接板位于顶板外侧,所述的连接板与顶板通过螺栓相连,所述的水箱位于连接板的下端,所述的水箱与连接板通过螺栓相连,所述供液头的数量为2件,沿水箱的左右方向对称布置,所述的进液头位于水箱顶部中心处,所述的进液头与水箱螺纹相连,所述水泵的数量为2件,沿连接板的左右方向对称布置,所述水泵的进水口与供液头通过软管相连,所述的水泵的出水口分别与进液头和喷头通过软管相连。9.如权利要求8所述的焊缝检测爬壁机器人,其特征在于所述的供液头还包括直通头、硅胶管、球型沉头,所述的直通头位于水箱的外侧,所述的直通头与水箱螺纹相连且与水泵的进水口通过软管相连,所述的硅胶管套装于直通头下端且伸入水箱内侧,所述的球型沉头套装于硅胶管下端且伸入水箱内侧,所述球型沉头的下端开设有进液孔,所述进液孔与硅胶管的腔体互通。10.如权利要求9所述的焊缝检测爬壁机器人,其特征在于所述的重力反馈机构还包括l型支架、测距传感器、滑杆、滑块、第二弹簧,所述l型支架的数量为2件,沿左右方向对称布置于顶板下端,所述的l型支架上端安装有测距传感器,所述的测距传感器与l型支架通过螺栓相连,所述的滑杆位于两件对称布置的l型支架之间,所述的滑杆与l型支架通过螺栓相连,所述的滑块被滑杆贯穿,所述的滑块沿滑杆的左右方向滑动,所述第二弹簧的数量为2件,沿左右方向对称布置在滑杆外侧,所述第二弹簧的两端分别与滑块和l型支架接触。
技术总结
本发明公开了一种焊缝检测爬壁机器人,包括顶板、探伤机构、磁轮机构、传感器组件、供液机构、重力反馈机构、控制器,传感器组件内的工业相机对焊缝进行检测,控制器根据焊缝检测结果,驱动四组磁轮机构转动进行焊缝跟踪,重力反馈机构根据重力检测结果驱动供液机构内的水泵连续的对待检测焊缝进行喷洒磁悬液作业,探伤机构内的第一伺服电机驱动磁粉探伤仪下移对待检测焊缝进行连续检测作业。该装置结构简单,通过独立的四组磁轮机构,能适应不同的容器壁面工作,同时,通过重力检测,实现供液机构的连续供液工作,提高了焊缝检测的效率、正确率以及可靠性。确率以及可靠性。确率以及可靠性。
技术研发人员:刘保国 汤中原 俞燕 吴文学 宋正启 胡必荣 赵卫东 李丹 方炜
受保护的技术使用者:池州市特种设备监督检验中心
技术研发日:2022.11.08
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。