一种乳头刺激设备的制作方法
- 国知局
- 2024-07-12 10:32:51
本发明涉及乳头刺激,例如用作吸乳器或其它乳汁收集装置的一部分。
背景技术:
1、吸乳器被母乳喂养的妇女用来从她们的乳房中抽取乳汁,以便抽取的乳汁可以在以后被喂给她们的婴儿。
2、众所周知,对于婴儿最好的营养是母乳。世界卫生组织(who)建议母乳喂养婴儿至少一年,优选更长时间。然而,母亲通常只在几周或几个月后就回去工作了。然后,为了给她们的婴儿提供最好的营养,母亲可以使用吸乳器挤压乳汁。挤压的乳汁可以被储存起来,并且在以后的阶段和/或由其他人喂给婴儿。
3、为了使用吸乳器,乳房通常被放入漏斗形的杯中,并且施加真空使得乳汁被抽取。电动吸乳器通常具有两种操作模式,即,刺激模式和抽取模式。典型吸乳器的操作利用循环压力波形,通常是负压或真空,其被施加到乳房罩(或一对乳房罩)内的乳房和乳头,以将乳汁从乳头吸出到收集容器中。典型的压力分布在最大负压之间振荡,并且然后在每个循环结束时返回到大气压。
4、在刺激模式期间,排乳反射被刺激。这例如利用相对高频率的循环压力波形,诸如2hz。一旦乳汁流出乳房,建议切换到抽取模式,其具有用于更有效的乳汁抽取的较低频率(通常约1hz)和较高强度泵送(即,压力下更低)。
5、当吸乳器被激活时,吸乳器内部的压力源(例如真空泵)产生真空,并且可以开始刺激模式。真空泵通常由电动马达驱动。对于便携式吸乳器,这些马达由电池电力驱动。也有使用手动驱动机械泵的吸乳器。
6、最近,有可穿戴式吸乳器的趋势。这些装置通常具有较小的形状因数,并且可以被完全穿戴在用户的身体上,允许用户自由移动。其中一些吸乳器小到足够适合放入用户的胸罩中。例如,马达、电池和乳汁容器被集成在一起以形成单个设备。
7、此外,存在被动式乳汁收集器,其可以被放置在乳房上,并且通常允许用户施加静态压力以将装置保持在位置上并帮助抽取乳汁。例如,这些收集器旨在用于母乳喂养时从非母乳喂养的乳房中收集乳汁。由婴儿提供的刺激在两个乳房上产生排乳反射,并且简单的被动真空通常足以抽取(一些)乳汁。
8、不幸的是,因为需要来自婴儿的刺激来产生排乳反射(mer)以开始乳流,所以这些乳汁收集器不能在婴儿不在周围的其它时刻使用。
9、基于包括振动以刺激mer的机械装置的乳头刺激在本领域中是已知的,例如,已知施加振动以促进mer,例如在ep 4 029 540中公开的。在没有婴儿的情况下通过刺激产生mer导致在任何合适的时间用乳汁收集器收集额外的乳汁。
10、然而,刺激需要与乳头的良好接触用于有效的刺激。乳头的形状和大小因人而异,以及在乳汁挤压期间动态变化。乳头尺寸的这些差异导致不一致和不可靠的乳头刺激。
11、因此,需要能够适应不同大小和形状的乳头的乳头刺激,确保在乳汁挤压期间的良好接触。
12、wo 2021/186006 a1公开了一种用于挤压母乳的生物机械吸乳器机构,其包括仿生漏斗、漏斗上的至少两个主动致动区和静止区,主动致动区由驱动机构或多个驱动机构致动,并且被配置为在吮吸期间复制婴儿舌头的复杂功能,即乳晕/乳头的物理刺激;乳头定位:产生和维持低水平基线真空以在乳房上产生空气密封:在漏斗内部产生亚大气压力;在漏斗中产生和维持接近零空气环境;以及独立地或同时地协调一个或两个致动区的负致动和正致动在预定义的范围内控制真空振荡。
13、us2021/0361837a1公开提供了一种具有乳晕刺激组件的吸乳器。吸乳器可以包括吸乳杯。吸乳器还可以包括连接到吸乳杯的真空部件。另外,吸乳器可以包括被包含在吸乳器内的乳晕刺激组件,该乳晕刺激组件包括上板;下板;和相对于上板移动下板的机构。
14、us2018/0126052a1公开了一种用于免手动护理和吸乳的系统,该系统包括乳房压缩系统,该乳房压缩系统使用在护理胸罩的杯内或被附接到吸乳器的凸缘的填充有空气的可塑腔,以在使用吸乳器时向乳房施加压力和按摩模式。该压缩或压力被径向地施加在乳房的表面上,并且其节奏和强度可以由用户通过使用控制器来调节,以便模仿手动压缩的最佳实践。这些具有压缩装置的胸罩杯在乳头上具有开口,以便吸乳器凸缘可以被插入穿过它们,并且以典型的方式用于抽取母乳,从而增加挤压的乳量。
技术实现思路
1、本发明由权利要求限定。
2、根据本发明的一个方面的实施例,提供了一种用于促进乳汁挤压的乳头刺激设备,包括:
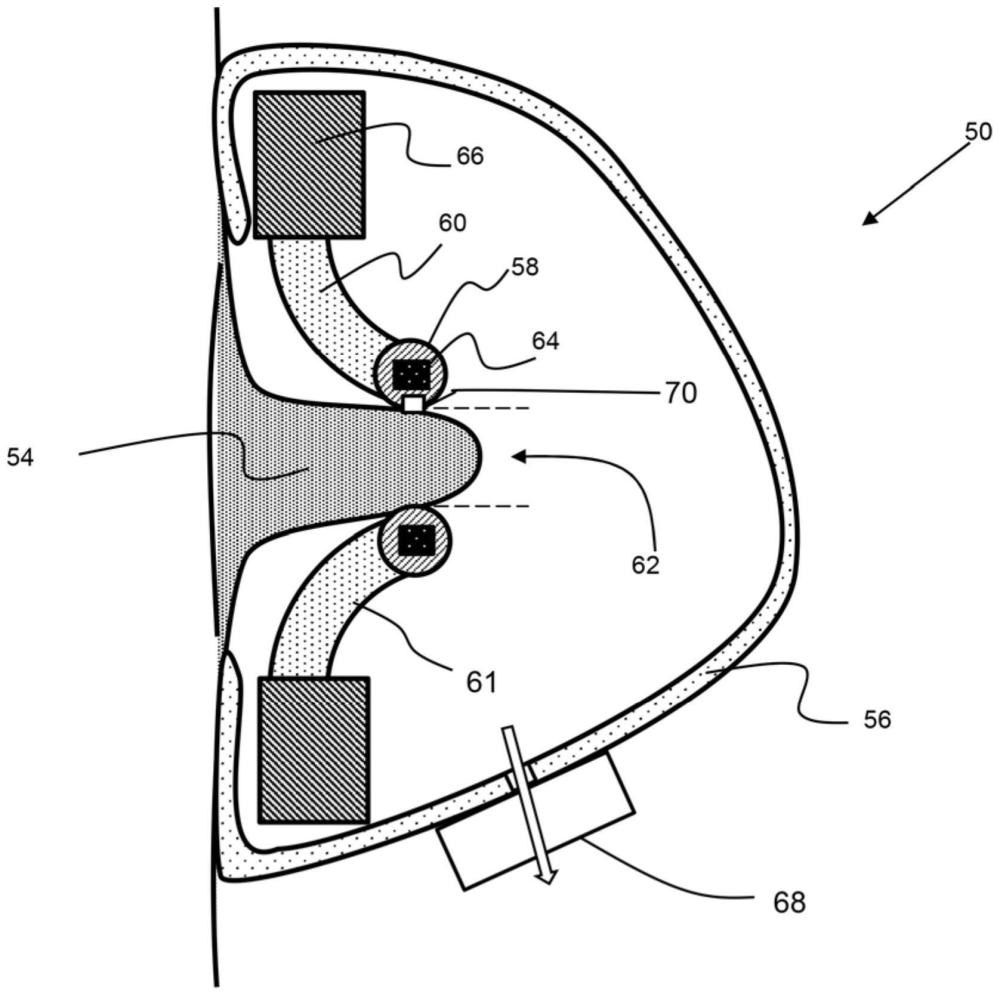
3、用于接触乳头的乳头接触装置,该乳头接触装置包括一个或多个柔性臂的集合,每个柔性臂具有远端,被配置为在使用中指向乳头,以便乳头接触装置能够与乳头大小的范围接触;以及
4、振动系统,包括一个或多个振动元件的集合,其中相应的振动元件沿柔性臂中的每个被安装,以用于将振动递送给柔性臂的远端。
5、乳头接触装置借助于沿着至少一个柔性臂被安装的振动元件将振动传递给乳头。柔性臂或多个柔性臂的设计在乳头已经弯曲时产生朝向乳头的偏置。特别是,柔性臂或多个柔性臂远离默认静止状态的变形产生恢复力。例如,乳头接触装置用于接触乳头的侧面和基部。这提供了有效的刺激而不会阻塞乳导管出口。
6、该系统通过向乳头/乳晕区域施加机械振荡或振动而提供了一种成本有效、小型且安静的产生排乳反射的方式。
7、每个柔性臂的振动元件优选地位于柔性臂的远端处。因此,振动元件位于柔性臂或多个柔性臂与乳头接触的位置处。
8、例如,乳头刺激设备包括至少三个柔性臂的集合,其中柔性臂的远端位于闭合形状的路径上,该闭合路径被配置为在使用中被定位在乳头周围,其中柔性臂将路径向内偏置(如果它们先前已经从静止状态向外变形)。
9、因此,闭合路径围绕乳头并且能够采用适合于与可能的乳头大小的范围接触的大小。例如,路径能够配置为形成如下环,该环的直径的范围包括12mm至18mm的范围。例如,当不存在乳头时,路径是具有4mm直径的圆,并且路径打开以将插入的乳头容纳为与乳头的大小(直径)匹配的大小。然后将恢复力(将环推回至其4mm直径)施加给乳头。
10、柔性臂的远端包括球形、椭圆形、芸豆形或者u形体。例如,远端是直径为8mm的球形。
11、乳头刺激设备可以包括框架,框架用于将柔性臂的集合的近端耦合在一起。该框架用作安装特征。例如,其将乳头接触装置和振动系统安装到乳汁收集腔。
12、例如,振动元件各自包括:
13、电动致动器;或者
14、压电致动器;或者
15、机械致动器。
16、电动致动器可以包括具有偏心旋转质量的马达、致动行星齿轮的马达或具有用于施加变化的接触深度或间歇的接触和释放的凸轮或类似装置的马达。例如,可以使用线性谐振致动器。
17、上述示例中的马达可以用手动致动的旋转设备代替。可以使用弹簧动力机构形式的机械致动器。
18、振动系统的振动频率可以在1hz到250hz的范围内。
19、当存在多个臂时,它们可以同步振动,因此同时遵循相同的模式,或者它们可以按顺序振动,因此一个接一个地遵循模式,或者它们可以在频率和振幅方面用独立的模式被驱动。
20、例如,振动系统的振动振幅小于2mm。发现这足以提供所需的刺激以促进排乳反射。
21、柔性臂的集合的硬度可以是可调的。然后,硬度确定所施加的恢复力。这可以用电活性聚合物来实现,或者借助于压力腔来实现,或者基于温度变化来实现。从而,施加在如图上的压力可以是可控的。
22、乳头刺激设备还可以包括接触压力传感器。这监测施加的压力并且使得能够提供反馈回路用于控制可调硬度。
23、本发明还提供了乳汁挤压系统,包括:
24、如上定义的乳头刺激设备;
25、乳汁收集腔,定位在乳头之上,并且用于收集挤压的乳汁。
26、因此,挤压系统刺激乳汁挤压并且提供乳汁的收集。乳头刺激设备优选地在乳汁收集腔的内部。
27、乳汁挤压系统还可以包括压力源,压力源用于在乳汁收集腔中产生低于大气压的压力。该(静态)负压可以直接地或者借助于膜间接地递送给腔。降低的压力进一步刺激乳汁挤压。
28、本发明还提供了合并有乳汁挤压系统的吸乳器,以及还提供了合并有乳汁挤压系统的乳汁收集系统。
本文地址:https://www.jishuxx.com/zhuanli/20240614/87632.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。