外科机器人系统中部件的存在和识别的制作方法
- 国知局
- 2024-07-12 10:34:22
背景技术:
1、外科机器人系统可包括外科控制台,该外科控制台控制一个或多个外科机器人臂,每个外科机器人臂具有带有端部执行器的外科器械(例如,夹钳或抓持器械)。在操作中,一个或多个机器人臂被移动到患者上方的位置,并且外科器械经由外科进入端口或患者的天然孔口被引导到小切口中,以将端部执行器定位在患者体内的工作部位处。
2、使用电子跟踪(例如,射频识别(rfid))来识别外科系统和医疗设备的各种部件。然而,当经受不同的灭菌程序和外部机械负载条件时,此类方法容易出现信号完整性问题。此外,当前的rfid跟踪器是不可配置的,并且不能检测多个部件、识别部件类型以及提供正确放置的状态更新和对部件的连续监控。
技术实现思路
1、本公开提供了一种无线通信接口,该无线通信接口包括读取器,该读取器被配置成用于射频通信(例如,rfid、蓝牙、近场通信(nfc)协议),以检测和读取与外科机器人臂的多个部件(包括器械驱动单元(idu)、无菌接口模块(sim)、器械、进入端口、无菌盖布、缝合器重装器、器械适配器等)相关联的识别标签。标签可包括天线和存储与部件中的每个部件有关的识别数据的芯片。标签还被配置成与部件的各种传感器通信。传感器可以被配置成测量部件的操作,包括扭矩、力、接近度、温度等。标签可以包覆成型或嵌入到部件上。标签可以是无源的、有源的(即,供电的),或者可以具有能量收集电路系统。
2、每个部件还包括机械联锁特征。因此,当部件被组装并且彼此联接时,标签被定位在设置在机器人臂上的读取器的对应读取区内。这确保了正确的部件放置,包括每个部件的联接顺序。另外,部件可以具有将部件中的每个部件和标签互连的冗余电触点。
3、无线通信接口被配置成检测读取区中的每个读取区内的所有标签,并且可以与特定部件上的相应读取器相关联。无线通信接口还支持多个部件的同时检测,以引导部件按照期望顺序放置和组装,例如将sim附接到idu、将器械附接到sim等。除了无线通信接口之外,该系统还被配置成支持来自部件的各种传感器(诸如扭矩、力、接近度、温度传感器等)的无线数据流。由于接近而由多个读取器检测多个部件也可以用于评估机器人臂的碰撞边界。还可以识别器械滚动的方向,以支持器械的滚动校准。
4、根据本公开的一个实施方案,公开了一种外科机器人系统。该外科机器人臂包括:机器人关节;第一部件,该第一部件被配置成联接到机器人关节;以及第二部件,该第二部件被配置成联接到第一部件。该外科机器人臂还包括:第一标签组件,该第一标签组件具有设置在第一部件中的第一部分和设置在第二部件中的第二部分,其中一旦第一部件与第二部件机械接合,第一标签组件的第一部分和第一标签组件的第二部分就电连通;以及无线通信接口,该无线通信接口被配置成询问第一标签组件。
5、上述实施方案的具体实施可包括以下特征中的一者或多者。根据上述实施方案的一个方面,第一部件可以是器械驱动单元。第二部件可以是无菌接口模块,该无菌接口模块被配置成将无菌盖布固定到器械驱动单元。第一标签组件的第一部分可包括第一对触点,并且第一标签组件的第二部分可包括第二对触点,第一对触点和第二对触点被配置成一旦第一部件与第二部件机械接合就彼此电联接。第一标签组件可包括第一标签天线。一旦第三部件与第二部件机械接合,第二标签组件的第一部分和第二标签组件的第二部分就电连通。无线通信接口被配置成询问第二标签组件。第二标签组件的第一部分可包括第一对触点,并且第二标签组件的第二部分可包括第二对触点,第二标签组件的第一对触点和第二对触点被配置成一旦第三部件与第二部件机械接合就彼此电联接。第二标签组件可包括第二标签天线。
6、根据本公开的另一个实施方案,公开了一种外科机器人系统。该外科机器人臂包括:机器人关节;器械驱动单元,该器械驱动单元被配置成联接到机器人关节;以及无菌接口模块,该无菌接口模块被配置成联接到器械驱动单元。该外科机器人臂还包括:第一标签组件,该第一标签组件可包括设置在器械驱动单元中的第一部分和设置在无菌接口模块中的第二部分,其中,一旦器械驱动单元与无菌接口模块机械接合,第一标签组件的第一部分和第一标签组件的第二部分就电连通;以及无线通信接口,该无线通信接口被配置成询问第一标签组件。
7、上述实施方案的具体实施可包括以下特征中的一者或多者。根据上述实施方案的一个方面,外科机器人臂还可包括被配置成联接到进入端口的闩锁端口。无线通信接口可包括沿着机器人关节的至少一部分设置的第一天线和设置在闩锁端口处的第二天线。器械驱动单元被配置成沿着机器人关节纵向地移动。第一标签组件的第一部分可包括第一对触点,并且第一标签组件的第二部分可包括第二对触点。第一对触点和第二对触点被配置成一旦器械驱动单元与无菌接口模块机械接合就彼此电联接。第一标签组件可包括第一标签天线。一旦器械与无菌接口模块机械接合,第二标签组件的第一部分和第二标签组件的第二部分就电连通。无线通信接口被配置成询问第二标签组件。第二标签组件的第一部分可包括第一对触点,并且第二标签组件的第二部分可包括第二对触点。第二标签组件的第一对触点和第二对触点被配置成一旦器械与无菌接口模块机械接合就彼此电联接。第二标签组件可包括第二标签天线。
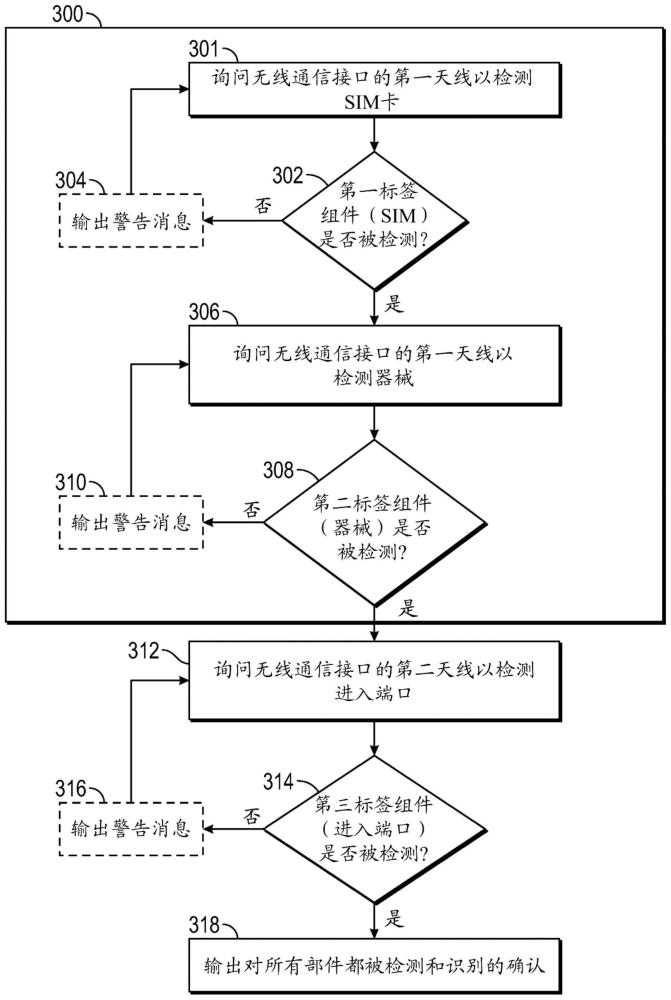
8、根据本公开的另外的实施方案,公开了一种用于检测外科机器人臂的部件的方法。该方法包括询问第一标签组件,该第一标签组件具有设置在第一部件中的第一部分和设置在第二部件中的第二部分。一旦第一部件与第二部件机械接合并且第一部件和第二部件中的至少一者联接到机器人关节,第一标签组件的第一部分和第一标签组件的第二部分就电连通。该方法还包括基于询问确定第一部件和第二部件是否彼此机械接合。
9、上述实施方案的具体实施可包括以下特征中的一者或多者。根据上述实施方案的一个方面,可以使用设置在机器人关节中的无线通信接口进行询问。一旦第三部件与第二部件机械接合,第二标签组件的第一部分和第二标签组件的第二部分就电连通。
10、根据本公开的又一个实施方案,公开了一种外科机器人臂。该外科机器人臂包括机器人关节和被配置成联接到机器人关节的器械驱动单元。该外科机器人臂还包括:多个rfid标签,该多个rfid标签设置在器械驱动单元上;以及无线通信接口,该无线通信接口被配置成在读取区中输出无线电信号并且询问多个rfid标签中的至少一个rfid标签。
11、上述实施方案的具体实施可包括以下特征中的一者或多者。根据上述实施方案的一个方面,器械驱动单元能够相对于机器人关节围绕纵向轴线旋转。无线通信接口还可包括平行于纵向轴线设置的纵向天线。多个rfid标签可以以相等的角度增量间隔开。器械驱动单元可以被配置成相对于机器人关节沿着纵向轴线机器人关节移动。该外科机器人臂还可包括联接到多个rfid标签的集成数据芯片。集成数据芯片可以是存储设备和/或传感器。
技术特征:1.一种外科机器人臂,所述外科机器人臂包括:
2.根据权利要求1所述的外科机器人臂,所述外科机器人臂还包括:
3.根据权利要求2所述的外科机器人臂,其中,所述无线通信接口包括沿着所述机器人关节的至少一部分设置的第一天线和设置在所述闩锁端口处的第二天线。
4.根据权利要求1所述的外科机器人臂,其中,所述器械驱动单元被配置成沿着所述机器人关节纵向地移动。
5.根据权利要求1所述的外科机器人臂,其中,所述第一rfid标签组件的所述第一部分包括第一对触点,并且所述第一rfid标签组件的所述第二部分包括第二对触点,所述第一对触点和所述第二对触点被配置成一旦所述器械驱动单元与所述无菌接口模块机械接合就彼此电联接。
6.根据权利要求1所述的外科机器人臂,其中,所述第一rfid标签组件包括第一rfid标签天线。
7.根据权利要求1所述的外科机器人臂,所述外科机器人臂还包括:
8.根据权利要求7所述的外科机器人臂,其中,所述第二rfid标签组件的所述第一部分包括第一对触点,并且所述第二rfid标签组件的所述第二部分包括第二对触点,所述第二rfid标签组件的所述第一对触点和所述第二对触点被配置成一旦所述器械与所述无菌接口模块机械接合就彼此电联接。
9.根据权利要求8所述的外科机器人臂,其中,所述第二rfid标签组件包括第二rfid标签天线。
10.一种外科机器人臂,所述外科机器人臂包括:
11.根据权利要求10所述的外科机器人臂,其中,所述第一部件是器械驱动单元。
12.根据权利要求11所述的外科机器人臂,其中,所述第二部件是无菌接口模块,所述无菌接口模块被配置成将无菌盖布固定到所述器械驱动单元。
13.根据权利要求10所述的外科机器人臂,其中,所述第一rfid标签组件的所述第一部分包括第一对触点,并且所述第一rfid标签组件的所述第二部分包括第二对触点,所述第一对触点和所述第二对触点被配置成一旦所述第一部件与所述第二部件机械接合就彼此电联接。
14.根据权利要求10所述的外科机器人臂,其中,所述第一rfid标签组件包括第一rfid标签天线。
15.根据权利要求10所述的外科机器人臂,所述外科机器人臂还包括:
16.根据权利要求15所述的外科机器人臂,其中,所述第二rfid标签组件的所述第一部分包括第一对触点,并且所述第二rfid标签组件的所述第二部分包括第二对触点,所述第二rfid标签组件的所述第一对触点和所述第二对触点被配置成一旦所述第三部件与所述第二部件机械接合就彼此电联接。
17.根据权利要求16所述的外科机器人臂,其中,所述第二rfid标签组件包括第二rfid标签天线。
18.一种用于检测外科机器人臂的部件的方法,所述方法包括:
19.根据权利要求18所述的方法,其中,使用设置在所述机器人关节中的无线通信接口进行询问。
20.根据权利要求19所述的方法,所述方法还包括:
21.一种外科机器人臂,所述外科机器人臂包括:
22.根据权利要求21所述的外科机器人臂,其中,所述器械驱动单元能够相对于所述机器人关节围绕纵向轴线旋转。
23.根据权利要求22所述的外科机器人臂,其中,所述无线通信接口包括平行于所述纵向轴线设置的纵向天线。
24.根据权利要求23所述的外科机器人臂,其中,所述多个rfid标签以相等的角度增量间隔开。
25.根据权利要求22所述的外科机器人臂,其中,所述器械驱动单元将相对于所述机器人关节沿着所述纵向轴线机器人关节移动。
26.根据权利要求21所述的外科机器人臂,所述外科机器人臂还包括联接到所述多个rfid标签的集成数据芯片。
27.根据权利要求26所述的外科机器人臂,其中,所述集成数据芯片是存储设备或传感器中的至少一者。
技术总结一种外科机器人臂包括无线通信接口,该无线通信接口用于检测机器人臂的各种部件,包括器械驱动单元、无菌接口模块(例如适配器)、器械、进入端口等。部件的检测用于通过在多个部件之间拆分标签组件来确认部件中的每个部件被正确地组装,使得当部件被正确地组装时,标签组件也被正确组装,从而允许无线通信接口对标签组件进行询问。技术研发人员:兰根·K·米什拉,阿洛克·阿格拉瓦尔,萨姆尔·B·凯斯纳,埃里克·J·泰勒,迈克尔·A·热姆洛克受保护的技术使用者:柯惠LP公司技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240614/87789.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表