一种外导轨奇数偶数机械臂分次回摆的机器人爬架的制作方法
- 国知局
- 2024-07-10 17:50:25
本发明涉及建筑爬架,特别是涉及一种外导轨奇数偶数机械臂分次回摆的机器人爬架。
背景技术:
1、机器人爬架通过在待施工的建筑外墙上固定附墙导座,滑套配合的外导轨和内导轨在动力驱动下时,导轨上安装的机械臂逐次踩踏在附墙导座的踩踏位上,为机械臂提供受力和回摆位点,从而实现外导轨和内导轨相对于附墙导座的升降,达到改变施工位置高度的目的,其广泛用于高层楼盘的建筑施工,相较于脚手架施工的方式,其安全性和施工效率大大提升。
2、目前,机器人爬架在升降过程中,内导轨机械臂和外导轨机械臂一般是分别或同时踩踏在附墙导座的相应踩踏位上的,其中,外导轨上的所有机械臂均同步摆动或回摆,这样,在内导轨或外导轨下降的过程中,若动力传动的结构链条出现断裂时,极易出现因外导轨机械臂和内导轨机械臂踩踏不稳造成的导轨下坠问题,机器人爬架的使用存在一定的安全隐患。
技术实现思路
1、基于此,有必要针对上述不足,提供一种可实现防坠、安全性高的外导轨奇数偶数机械臂分次回摆的机器人爬架。
2、一种外导轨奇数偶数机械臂分次回摆的机器人爬架,包括滑套配合的外导轨和内导轨、用于驱动外导轨与内导轨相对滑动的动力机构,外导轨沿其长度方向排布若干外导轨机械臂,内导轨沿其长度方向排布若干内导轨机械臂,还包括驱动外导轨机械臂和内导轨机械臂回摆的机械臂回摆组件;
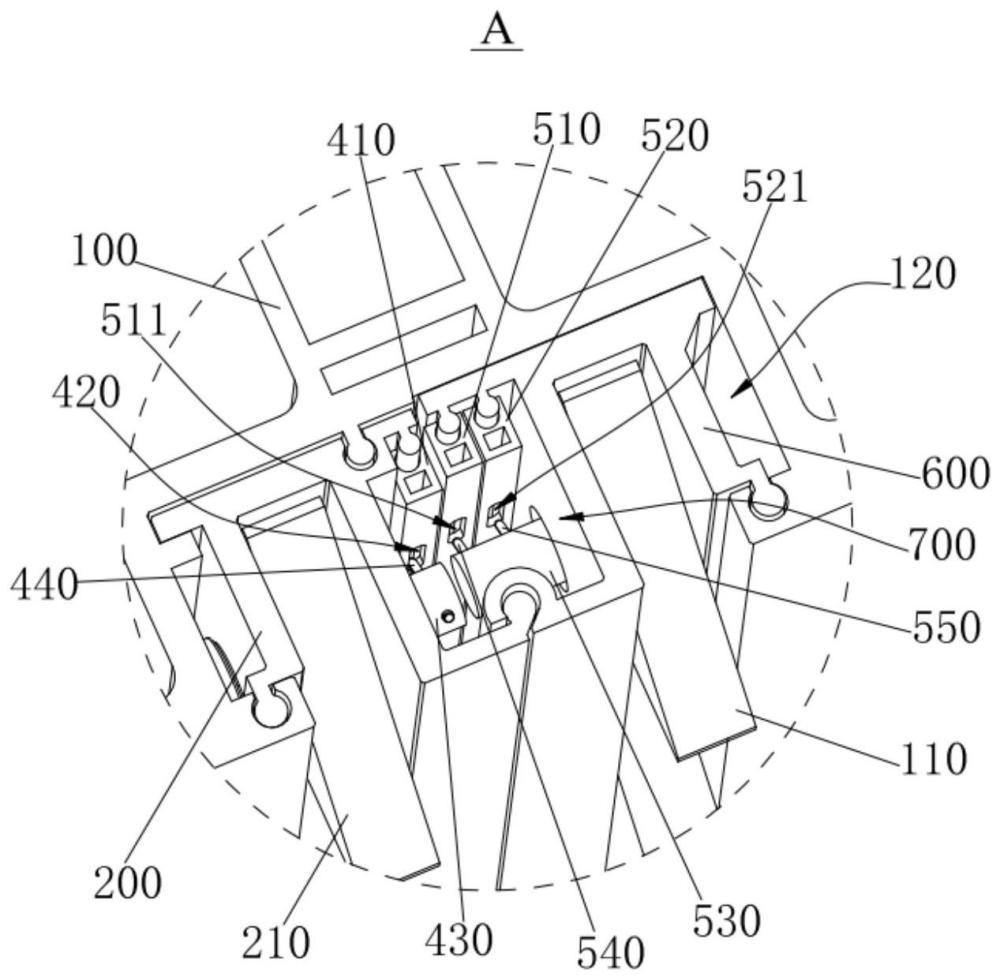
3、所述机械臂回摆组件包括内导轨机械臂回摆机构和外导轨机械臂回摆机构,所述外导轨机械臂回摆机构包括与外导轨相对滑动并分别沿外导轨长度方向延伸的外导轨奇数回摆拉杆和外导轨偶数回摆拉杆、跟随外导轨机械臂升降并同步摆动的第二转轴、间隔设置在第二转轴上的第二摆针和第三摆针、与第二转轴连接并带动第二转轴回摆复位的第二扭簧、用于驱动外导轨奇数回摆拉杆升降的第二驱动件、以及用于驱动外导轨偶数回摆拉杆升降的第三驱动件,所述外导轨奇数回摆拉杆上沿其长度方向开设有供第二摆针插入的若干第二插孔,所述外导轨偶数回摆拉杆上沿其长度方向开设有供第三摆针插入的若干第三插孔,所述第二驱动件和第三驱动件交替驱动外导轨奇数回摆拉杆和外导轨偶数回摆拉杆升降,以使外导轨上奇数位的外导轨机械臂和偶数位的外导轨机械臂分次回摆。
4、在其中一个实施例中,所述内导轨机械臂回摆机构包括滑套安装在内导轨上且沿其长度方向开设有若干第一插孔的内导轨回摆拉杆、跟随内导轨机械臂升降并同步摆动的第一转轴、固定在第一转轴环侧并插入第一插孔的第一摆针、带动第一转轴回摆的第一扭簧、以及用于驱动内导轨回摆拉杆升降的第一驱动件。
5、在其中一个实施例中,机器人爬架还包括辅助导轨,所述外导轨设有开放型腔,辅助导轨收容于所述开放型腔并与外导轨固定连接,所述内导轨收容于开放型腔并与辅助导轨并排设置,内导轨分别与外导轨和辅助导轨滑套配合,所述内导轨沿其长度方向开设有第一通槽,各所述内导轨机械臂分别通过第一转轴摆动设置于第一通槽内,所述辅助导轨沿其长度方向开设有第二通槽,各所述外导轨机械臂分别通过第二转轴摆动设置于第二通槽内。
6、在其中一个实施例中,所述内导轨与辅助导轨分别呈π字形结构,内导轨π字形结构的两竖部之间形成所述第一通槽,辅助导轨π字形结构的两竖部之间形成所述第二通槽,且内导轨与辅助导轨滑套配合的两个竖部之间形成回摆腔室。
7、在其中一个实施例中,所述内导轨回摆拉杆收容于回摆腔室内并与内导轨滑套配合,所述外导轨奇数回摆拉杆和外导轨偶数回摆拉杆收容于回摆腔室内并分别与辅助导轨滑套配合,第一转轴的末端和第二转轴的末端分别插入回摆腔室内,且第一摆针、第二摆针以及第三摆针分别位于回摆腔室内。
8、在其中一个实施例中,内导轨机械臂、第一转轴、第一摆针以及第一插孔的数量相同;外导轨机械臂、第二转轴、第二摆针、第三摆针、第二插孔以及第三插孔的数量相同。
9、在其中一个实施例中,所述外导轨呈t字形结构,外导轨t字形结构的竖部开设有若干安装孔,外导轨t字形结构的横部开设有所述开放型腔。
10、在其中一个实施例中,所述第一驱动件、第二驱动件以及第三驱动件分别为电机连杆驱动结构。
11、在其中一个实施例中,相邻两个外导轨机械臂之间的距离介于80-120mm之间,相邻两个内导轨机械臂之间的距离介于80-120mm之间。
12、实施本发明的外导轨奇数偶数机械臂分次回摆的机器人爬架,采用外导轨奇数回摆拉杆和外导轨偶数回摆拉杆单独控制外导轨上奇数位的外导轨机械臂和偶数位上的外导轨机械臂摆动,在第二驱动件和第三驱动件交替驱动外导轨奇数回摆拉杆和外导轨偶数回摆拉杆下降的情况下,即实现外导轨上奇数位的外导轨机械臂和偶数位上的外导轨机械臂分次回摆,如此,当机器人爬架的动力机构出现传动结构链条断裂的情况时,若内导轨下降,则外导轨机械臂始终踩踏在附墙导座的相应踩踏位上,若外导轨下降,由于外导轨上奇数偶数位的机械臂分次回摆,能够保证有一半数量的外导轨机械臂回摆,一半数量的外导轨机械臂在已复位状态,从而实现了对机器人爬架故障情况下的防坠,提升了机器人爬架使用的安全性。
技术特征:1.一种外导轨奇数偶数机械臂分次回摆的机器人爬架,其特征在于,包括滑套配合的外导轨和内导轨、用于驱动外导轨与内导轨相对滑动的动力机构,外导轨沿其长度方向排布若干外导轨机械臂,内导轨沿其长度方向排布若干内导轨机械臂,还包括驱动外导轨机械臂和内导轨机械臂回摆的机械臂回摆组件;
2.根据权利要求1所述的机器人爬架,其特征在于,所述内导轨机械臂回摆机构包括滑套安装在内导轨上且沿其长度方向开设有若干第一插孔的内导轨回摆拉杆、跟随内导轨机械臂升降并同步摆动的第一转轴、固定在第一转轴环侧并插入第一插孔的第一摆针、带动第一转轴回摆的第一扭簧、以及用于驱动内导轨回摆拉杆升降的第一驱动件。
3.根据权利要求2所述的机器人爬架,其特征在于,还包括辅助导轨,所述外导轨设有开放型腔,辅助导轨收容于所述开放型腔并与外导轨固定连接,所述内导轨收容于开放型腔并与辅助导轨并排设置,内导轨分别与外导轨和辅助导轨滑套配合,所述内导轨沿其长度方向开设有第一通槽,各所述内导轨机械臂分别通过第一转轴摆动设置于第一通槽内,所述辅助导轨沿其长度方向开设有第二通槽,各所述外导轨机械臂分别通过第二转轴摆动设置于第二通槽内。
4.根据权利要求3所述的机器人爬架,其特征在于,所述内导轨与辅助导轨分别呈π字形结构,内导轨π字形结构的两竖部之间形成所述第一通槽,辅助导轨π字形结构的两竖部之间形成所述第二通槽,且内导轨与辅助导轨滑套配合的两个竖部之间形成回摆腔室。
5.根据权利要求4所述的机器人爬架,其特征在于,所述内导轨回摆拉杆收容于回摆腔室内并与内导轨滑套配合,所述外导轨奇数回摆拉杆和外导轨偶数回摆拉杆收容于回摆腔室内并分别与辅助导轨滑套配合,第一转轴的末端和第二转轴的末端分别插入回摆腔室内,且第一摆针、第二摆针以及第三摆针分别位于回摆腔室内。
6.根据权利要求5所述的机器人爬架,其特征在于,内导轨机械臂、第一转轴、第一摆针以及第一插孔的数量相同;外导轨机械臂、第二转轴、第二摆针、第三摆针、第二插孔以及第三插孔的数量相同。
7.根据权利要求6所述的机器人爬架,其特征在于,所述外导轨呈t字形结构,外导轨t字形结构的竖部开设有若干安装孔,外导轨t字形结构的横部开设有所述开放型腔。
8.根据权利要求7所述的机器人爬架,其特征在于,所述第一驱动件、第二驱动件以及第三驱动件分别为电机连杆驱动结构。
9.根据权利要求8所述的机器人爬架,其特征在于,相邻两个外导轨机械臂之间的距离介于80-120mm之间,相邻两个内导轨机械臂之间的距离介于80-120mm之间。
技术总结本发明涉及建筑爬架技术领域,公开了一种可实现防坠、安全性高的外导轨奇数偶数机械臂分次回摆的机器人爬架,包括滑套配合的设有外导轨机械臂的外导轨和设有内导轨机械臂的内导轨、动力机构及机械臂回摆组件;机械臂回摆组件包括内导轨机械臂回摆机构和外导轨机械臂回摆机构,外导轨机械臂回摆机构包括设有第二插孔的外导轨奇数回摆拉杆和设有第三插孔的外导轨偶数回摆拉杆、与外导轨机械臂同步摆动的第二转轴、设在第二转轴上的第二摆针和第三摆针、驱动第二转轴回摆复位的第二扭簧、对应驱动外导轨奇数回摆拉杆和外导轨偶数回摆拉杆升降的第二驱动件和第三驱动件,第二驱动件和第三驱动件交替工作以驱动外导轨奇数位和偶数位的机械臂分次回摆。技术研发人员:沈海晏,吕光利受保护的技术使用者:深圳市特辰科技股份有限公司技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240615/65117.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表