一种可控履带式绳锯切割机器人的制作方法
- 国知局
- 2024-07-10 18:05:26
本技术涉及绳锯切割,尤其是涉及一种可控履带式绳锯切割机器人。
背景技术:
1、工程地基基础及深基坑施工过程中,常常需要设计一些临时支护设施用以保证基坑安全稳定。上述临时支护设施往往体积较大、混凝土强度较高,后期破除困难。在矿山开采中也往往遇到不规则且强度较高的矿物质。
2、对于上述情况,通常采用绳锯对上述临时支护设施及矿物质进行处理。但是,上述环境往往路况较差,空间狭窄,绳锯运行困难且需耗费大量劳动力进行移动。
3、相应地,需要一种新型绳锯解决上述技术问题。
技术实现思路
1、本实用新型的内容部分用于以简要的形式介绍构思,这些构思将在后面的具体实施方式部分被详细描述。本公开的内容部分并不旨在标识要求保护的技术方案的关键特征或必要特征,也不旨在用于限制所要求的保护的技术方案的范围。
2、本实用新型提供一种可控履带式绳锯切割机器人,来解决以上背景技术部分提到的技术问题。
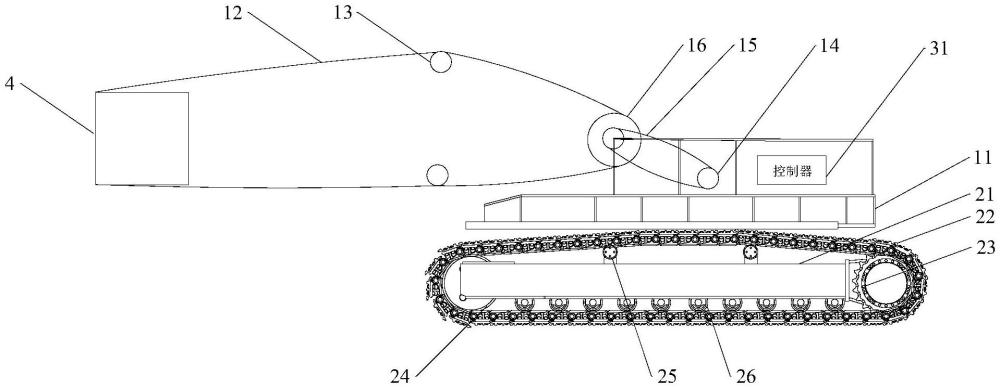
3、本实用新型的一种可控履带式绳锯切割机器人,包括履带式底盘、绳锯切割组件以及控制器组件,其中,所述绳锯切割组件设置到所述履带式底盘上;所述控制器组件包括与所述履带式底盘通讯连接的控制器和与所述控制器通讯连接的遥控终端;在工作状态下,所述控制器通过接收所述遥控终端的遥控信息控制所述履带式底盘带动所述绳锯切割组件移动。
4、可选的,所述履带式底盘包括支架,所述绳锯切割组件架设到所述支架上。
5、可选的,所述绳锯切割组件包括绳锯、切割传动组件以及两个飞轮,所述绳锯与所述切割传动组件连接,在工作状态下,所述切割传动组件带动所述绳锯转动;所述飞轮连接到所述支架上,在组装好的状态下,两个所述飞轮与所述绳锯结合,用于张紧所述绳锯。
6、可选的,所述切割传动组件包括驱动电机、主动轮、皮带和导向轮,所述驱动电机与所述主动轮连接;所述主动轮和所述导向轮通过所述皮带连接;所述绳锯与所述导向轮连接;在工作状态下,所述驱动电机带动主动轮转动,所述主动轮通过所述皮带带动所述导向轮转动,所述导向轮带动所述绳锯转动进行切割。
7、可选的,所述绳锯是金刚石绳锯。
8、可选的,所述履带式底盘包括履带架、对称地设置到所述履带架两侧的两个履带机构;每个所述履带机构包括履带、驱动组件、多个支重轮以及多个托轮;所述驱动组件与所述履带啮合,用于驱动所述履带转动;所述多个支重轮枢转地设置到所述履带架底部,所述多个托轮设置到所述履带架上部,在组装好的状态下,所述履带与所述多个支重轮和所述多个托轮啮合。
9、可选的,所述驱动组件包括驱动链轮、引导轮以及行走马达,所述驱动链轮和所述引导轮设置到所述履带架前后两端,所述驱动链轮与所述行走马达连接,所述履带与所述驱动链轮和所述引导轮啮合,在工作状态下,所述行走马达带动所述驱动链轮转动,所述驱动链轮带动履带和引导轮转动。
10、可选的,所述履带机构还包括相连接的涨紧油缸和涨紧轮,所述涨紧油缸用于调节所述涨紧轮的位置进而调节所述履带的紧张度。
11、可选的,所述控制器与每个所述行走马达通讯连接,用于在所述遥控终端的控制下控制两个履带机构动作。
12、可选的,所述控制器与所述遥控终端通过无线网络或者蓝牙连接。
13、本实用新型的上述实施例具有如下有益效果:通过本实用新型的一些实施例的一种可控履带式绳锯切割机器人,通过将绳锯切割组件设置到履带式底盘上,能够使绳锯切割组件依托履带式底盘在基坑或者矿山中360度旋转及移动,有效弥补了传统导轨式绳锯机活动不便的缺陷,进而节省了劳动力。
14、此外,通过设置上述控制组件,能够使工作人员通过控制遥控终端控制上述履带式底盘移动,进而避免了在深基坑或者矿山中操作人员由于切割作业导致的安全问题的发生。
技术特征:1.一种可控履带式绳锯切割机器人,其特征在于,包括履带式底盘、绳锯切割组件以及控制器组件,其中,
2.根据权利要求1所述的一种可控履带式绳锯切割机器人,其特征在于,所述履带式底盘包括支架,所述绳锯切割组件架设到所述支架上。
3.根据权利要求2所述的一种可控履带式绳锯切割机器人,其特征在于,所述绳锯切割组件包括绳锯、切割传动组件以及两个飞轮,所述绳锯与所述切割传动组件连接,在工作状态下,所述切割传动组件带动所述绳锯转动;所述飞轮连接到所述支架上,在组装好的状态下,两个所述飞轮与所述绳锯结合,用于张紧所述绳锯。
4.根据权利要求3所述的一种可控履带式绳锯切割机器人,其特征在于,所述切割传动组件包括驱动电机、主动轮、皮带和导向轮,所述驱动电机与所述主动轮连接;所述主动轮和所述导向轮通过所述皮带连接;所述绳锯与所述导向轮连接;在工作状态下,所述驱动电机带动主动轮转动,所述主动轮通过所述皮带带动所述导向轮转动,所述导向轮带动所述绳锯转动进行切割。
5.根据权利要求4所述的一种可控履带式绳锯切割机器人,其特征在于,所述绳锯是金刚石绳锯。
6.根据权利要求4所述的一种可控履带式绳锯切割机器人,其特征在于,所述履带式底盘包括履带架、对称地设置到所述履带架两侧的两个履带机构;每个所述履带机构包括履带、驱动组件、多个支重轮以及多个托轮;所述驱动组件与所述履带啮合,用于驱动所述履带转动;所述多个支重轮枢转地设置到所述履带架底部,所述多个托轮设置到所述履带架上部,在组装好的状态下,所述履带与所述多个支重轮和所述多个托轮啮合。
7.根据权利要求6所述的一种可控履带式绳锯切割机器人,其特征在于,所述驱动组件包括驱动链轮、引导轮以及行走马达,所述驱动链轮和所述引导轮设置到所述履带架前后两端,所述驱动链轮与所述行走马达连接,所述履带与所述驱动链轮和所述引导轮啮合,在工作状态下,所述行走马达带动所述驱动链轮转动,所述驱动链轮带动履带和引导轮转动。
8.根据权利要求7所述的一种可控履带式绳锯切割机器人,其特征在于,所述履带机构还包括相连接的涨紧油缸和涨紧轮,所述涨紧油缸用于调节所述涨紧轮的位置进而调节所述履带的紧张度。
9.根据权利要求8所述的一种可控履带式绳锯切割机器人,其特征在于,所述控制器与每个所述行走马达通讯连接,用于在所述遥控终端的控制下控制两个履带机构动作。
10.根据权利要求9所述的一种可控履带式绳锯切割机器人,其特征在于,所述控制器与所述遥控终端通过无线网络或者蓝牙连接。
技术总结本技术提供了一种可控履带式绳锯切割机器人,包括履带式底盘、绳锯切割组件以及控制器组件,绳锯切割组件设置到履带式底盘上;控制器组件包括与履带式底盘通讯连接的控制器和与控制器通讯连接的遥控终端。该实施方式通过将绳锯切割组件设置到履带式底盘上,能够使绳锯切割组件依托履带式底盘在基坑或者矿山中360度旋转及移动,有效弥补了传统导轨式绳锯机活动不便的缺陷,进而节省了劳动力。此外,通过设置控制组件,能够使工作人员通过控制遥控终端控制履带式底盘移动,进而避免了在深基坑或者矿山中操作人员由于切割作业导致的安全问题的发生。技术研发人员:刘洋,王兴邦,王国元,刁云亮,何盼龙,高国强受保护的技术使用者:中建一局集团第三建筑有限公司技术研发日:20231011技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240615/66249.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。