一种基于双跑道的自适应控制方法及系统与流程
- 国知局
- 2024-07-11 16:02:43
本发明一般地涉及医疗器械。更具体地,本发明涉及一种基于双跑道的自适应控制方法及系统。
背景技术:
1、对于偏瘫或者下肢有运动障碍的患者来说,他们需要进行行走跑步训练。适当行走跑训练可以帮助该类患者预防肌肉萎缩和挛缩、健康肢体的运动能力以及维持良好的心肺功能。
2、现有用于康复训练的跑步机通常只有一个跑道,但是很多下肢有运动障碍的患者,其左、右腿的健康状况并不相同,因此其左、右腿所需求的训练量也不相同,这使得患者一次的康复训练并不能同时使其下肢的肌肉得到充分以及合适的锻炼。
技术实现思路
1、为解决患者一次康复训练中不能同时使下肢的肌肉得到充分以及合适锻炼的问题,本发明提出一种基于双跑道的自适应系统及方法。为此,本发明在如下的多个方面中提供方案。
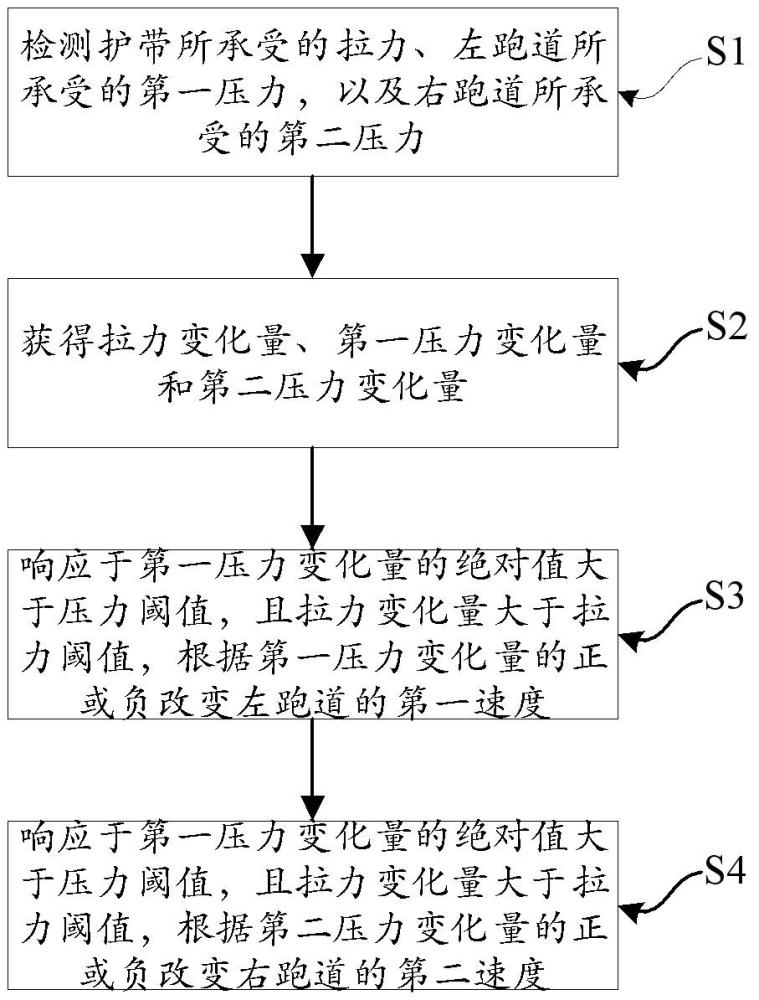
2、在第一方面中,本发明提出了一种基于双跑道的自适应控制方法,包括左跑道、右跑道,左驱动电机、右驱动电机,护带,其佩戴在患者胸部或/和腰部,所述方法包括:检测护带所承受的拉力、左跑道所承受的第一压力,以及右跑道所承受的第二压力;获得拉力变化量、第一压力变化量和第二压力变化量;响应于第一压力变化量的绝对值大于压力阈值,且拉力变化量大于拉力阈值,根据第一压力变化量的正负改变左跑道的第一速度;响应于第一压力变化量的绝对值大于压力阈值,且拉力变化量大于拉力阈值,根据第二压力变化量的正负改变右跑道的第二速度。
3、在一个实施例中,该方法还包括:响应于第一压力变化量的绝对值小于压力阈值,不改变所述第一速度;响应于第二压力变化量的绝对值小于压力阈值,不改变所述第二速度;响应于拉力变化量小于拉力阈值,不改变所述第一速度和所述第二速度。
4、在一个实施例中,获得拉力变化量、第一压力变化量和第二压力变化量包括:检测当前周期以及上一周期的拉力、第一压力和第二压力;计算当前周期较于上一周期的拉力变化量、第一压力变化量和第二压力变化量。
5、在一个实施例中,根据第一压力变化量的正负改变左跑道的第一速度包括:确认第一压力变化量为正或负;响应于第一压力变化量为正,即第一压力增加,左驱动电机的输出功率,使左跑道的速度增加 m,其中 m为预定大小的速度值,其单位为 m/ s;响应于第一压力变化量为负,即第一压力减少,减少左驱动电机的输出功率,使左跑道的速度减少 m。
6、在一个实施例中,通过减少减少左驱动电机的输出功率,使左跑道的速度减少 m。
7、在一个实施例中,根据第二压力变化量的正负改变右跑道的第二速度包括:获得第二压力变化量的正负;响应于第二压力变化量为正,即第二压力增加,增加右驱动电机的输出功率,使右跑道的速度增加 m;响应于第二压力变化量为负,即第二压力减少,减少右驱动电机的输出功率,使右跑道的速度减少 m。
8、在一个实施例中,通过减少减少右驱动电机的输出功率,使右跑道的速度减少 m。
9、在第二个方面,本发明提出了一种基于双跑道的自适应控制系统,其特征在于,包括:处理器;存储器,其存储计算机程序,当所述计算机程序由所述处理器运行时,使得设备执行上述技术实现要素:中任意一项所述的基于双跑道的自适应控制方法。
10、本发明提供一种基于双跑道的自适应控制方法和系统,适应于双腿障碍有区别的患者。通过实时测量康复训练设备所承受的拉力和压力判断患者的状态,进而调整左跑道和右跑道的速度,使患者的运动强度更适合其状态。再者,本发明分别控制左跑道的第一速度和右跑道的第二速度,使左跑道的第一速度适合于患者左侧腿部的健康状态;使右跑道的第二速度适合于患者右侧腿部的健康状态。
11、基于此,本发明能够实现患者的行走跑步训练,并且根据双腿障碍等级来进行自动调整训练强度,提高训练的效果。
技术特征:1.一种基于双跑道的自适应控制方法,包括左跑道、右跑道,左驱动电机、右驱动电机,护带,其佩戴在患者胸部或/和腰部,其特征在于,包括:
2.根据权利要求1所述的基于双跑道的自适应控制方法,其特征在于,还包括:
3.根据权利要求1所述的基于双跑道的自适应控制方法,其特征在于,获得拉力变化量、第一压力变化量和第二压力变化量包括:
4.根据权利要求1所述的基于双跑道的自适应控制方法,其特征在于,根据第一压力变化量的正负改变左跑道的第一速度包括:
5.根据权利要求4所述的基于双跑道的自适应控制方法,其特征在于,通过减少减少左驱动电机的输出功率,使左跑道的速度减少m。
6.根据权利要求1所述的基于双跑道的自适应控制方法,其特征在于,根据第二压力变化量的正负改变右跑道的第二速度包括:
7.根据权利要求6所述的基于双跑道的自适应控制方法,其特征在于,通过减少减少右驱动电机的输出功率,使右跑道的速度减少m。
8.一种基于双跑道的自适应控制系统,其特征在于,包括:
技术总结本发明涉及医疗器械技术领域,更具体地,本发明涉及一种基于双跑道的自适应控制方法及系统,包括左跑道、右跑道,左驱动电机、右驱动电机,护带,其佩戴在患者胸部或/和腰部,所述方法包括:检测护带所承受的拉力、左跑道所承受的第一压力,以及右跑道所承受的第二压力;获得拉力变化量、第一压力变化量和第二压力变化量;响应于第一压力变化量的绝对值大于压力阈值,且拉力变化量大于拉力阈值,根据第一压力变化量的正负改变左跑道的第一速度;响应于第一压力变化量的绝对值大于压力阈值,且拉力变化量大于拉力阈值,根据第二压力变化量的正负改变右跑道的第二速度。技术研发人员:何永正,孟令珂,钱钰琦,刘笛,周珂,杨登辉受保护的技术使用者:河南翔宇医疗设备股份有限公司技术研发日:技术公布日:2024/4/8本文地址:https://www.jishuxx.com/zhuanli/20240615/77141.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。