一种三自由度前臂康复外骨骼机器人
- 国知局
- 2024-07-11 17:33:25
本发明涉及一种机器人,尤其涉及一种三自由度前臂康复外骨骼机器人,属于康复训练机器人领域。
背景技术:
1、前臂是人体上肢一个重要的组成部分,人体前臂包含肘、腕两个关节,通过肘、腕关节完成人体前臂的弯曲、旋转等运动,最终配合肩部完成整个上肢的运动。近年来,因脑卒中引起患者上肢瘫痪的案例逐步增多,现有专业的康复医师数量不足,难以满足患者的康复需求,通过外骨骼机器人代替康复医师对患者进行康复训练逐渐成为主流。然而,现有的大部分康复外骨骼机器人主要关注肩关节的运动,而很少考虑到肘关节和腕关节的运动;而且现有的前臂康复外骨骼一般采用谐波减速器一级减速方式,造成关节体积偏大、刚度较低、承载能力略显不足;腕部机构的设计与人体前臂旋前旋后自由度的运动协同性不足,不能很好地实现完备舒适的康复训练。特设计此带动肩部、肘部和腕部的三自由度前臂康复外骨骼机器人。
技术实现思路
1、针对上述的不足,本发明提供了一种能够带动肩部、肘部和腕部各一个自由度运动的三自由度前臂康复机器人。
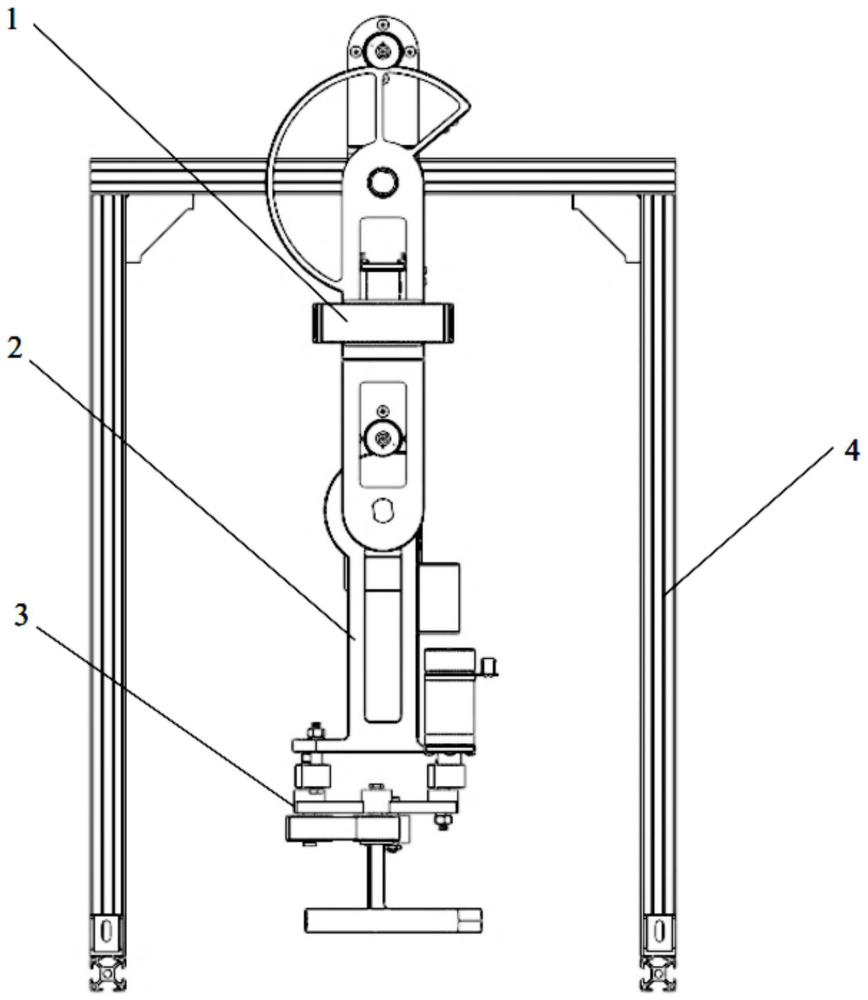
2、本发明是通过以下技术方案实现的:一种前臂康复外骨骼机器人,其特征在于,包括:
3、机架部件,设置于第一关节下方。
4、上臂部件,所述上臂部件包含第一关节,所述第一关节与机架部件相连,所述第一关节与上臂外壳连接,所述上臂外壳上安装长度调节装置,所述长度调节装置与前臂外壳相连。
5、前臂部件,所述前臂部件包含第二关节,所述第二关节与所述上臂外壳下端通孔螺栓连接,所述第二关节与前臂外壳上端通过螺栓相连。
6、腕部部件,所述腕部部件包含第三关节,所述第三关节与所述前臂外壳下端通过螺栓连接,所述第三关节与为平行四边形机构,所述平行四边形机构下端安装手柄。
7、进一步的,所述第一关节由第一关节电机、第一关节减速器、第一关节绞盘主动轮、第一关节电机支撑架、第一关节支撑板、第一滚动轴承、第二滚动轴承、第一关节转动轴、第一上臂外壳组成的,所述第一关节电机支撑板与机架部件上端通过螺栓相连,所述第一关节电机支撑架通过螺栓固定在第一关机电机支撑板上端,所述第一关节电机通过螺栓固定在第一关节电机支撑架上端,所述第一关节减速器与第一关节电机轴向连接,所述第一关节绞盘主动轮通过螺栓轴向固定在第一关节减速器的输出轴上,所述第一关节绞盘主动轮通过平键周向固定在第一关节减速器的输出轴上,所述第一关节转动轴与第一关节支撑板相连,所述第一上臂外壳内部通过第一滚动轴承和第二滚动轴承内圈与第一关节转动轴外圈相连,可沿第一关节转动轴轴线转动,所述上臂绑缚带与第一上臂外壳下端通过螺钉连接,所述第一关节外壳带有第一关节绞盘从动轮,通过钢丝绳带动第一关节绞盘从动轮转动。
8、进一步的,所述第二关节由第二关节电机、第二关节减速器、第二关节绞盘主动轮、第三滚动轴承、第四滚动轴承、第二关节转动轴、前臂外壳、第二关节驱动器保护壳构成,所述第二关节电机与第二关节减速器轴向连接,所述第二关节减速器通过螺栓与第二上臂外壳后端连接,所述第二关节绞盘主动轮通过螺栓轴向固定在第一关节减速器的输出轴上,所述第二关节绞盘主动轮通过平键周向固定在第一关节减速器的输出轴上,所述第二关节转动轴与第二上臂外壳内部连接,所述前臂外壳通过第三滚动轴承和第四滚动轴承内圈与第二关节转动轴外圈相连,可沿第二关节转动轴轴线转动,所述第二关节驱动器保护壳通过螺钉固定在前臂外壳下端。
9、进一步的,所述长度调节装置由第一光轴、第二光轴、第一直线轴承、第二直线轴承、光轴挡板组成的,所述第一光轴和第二光轴分别与第一直线轴承和第二直线轴承连接,第一直线轴承和第二直线轴承可间隙调整,通过间隙调整实现第一光轴和第二光轴的定位,所述第一光轴和第二光轴两端带有螺纹,上端通过螺母与光轴挡板固定,下端通过螺母与上臂外壳固定,所述第一直线轴承和第二直线轴承通过螺钉与上臂外壳相连。
10、所述第三关节为平行四边形机构,由第三关节电机、第一连杆、第二连杆、三角形连杆、第一同步带轮、第二同步带轮、同步带、第一转动轴、第二转动轴、第三转动轴、张紧轮转动轴、张紧轮、腕部转动轴、手柄构成,所述第三关节电机与第三关节减速器轴向连接,所述第三关节减速器通过螺栓与前臂外壳下端连接,所述第一连杆通过键连接周向固定在第三关节减速器的输出轴上,所述第一连杆通过两个成直角分布的紧定螺钉轴向固定在第三关节减速器的输出轴下端,所述第二连杆通过第一转动轴和滚动轴承与前臂外壳下端连接,通过螺母进行固定,所述第一连杆和第二连杆的另一端分别通过第二转动轴和第三转动轴和滚动轴承连接于三角形连杆的两个孔位,所述三角形连杆上第二转动轴和第三转动轴的转动中心距离与前臂外壳上第一转动轴和第三关节减速器输出轴的转动中心的距离相等,所述第一连杆与第二连杆的长度相等,所述三角形连杆、第一连杆、第二连杆、前部外壳构成平行四边形,实现第一连杆和第二连杆同时进行圆弧运动,所述第二转动轴有两个键槽,通过两个平键分别与第一同步带轮和第二连杆固定,所述腕部转动轴一端带有螺纹孔,通过滚动轴承与三角形连杆的另一端连接,通过平键使第二同步带轮周向固定在腕部转动轴上,通过螺钉和轴端挡板使第二同步带轮轴向固定在腕部传动轴上,所述手柄通过螺栓与第二同步带轮下端固定连接,所述手柄通过所述第二同步带轮与所述第二连杆通过所述平行四边形机构完成同步转动,所述张紧轮通过滚动轴承与张紧轮转动轴连接,张紧轮转动轴两侧带有螺纹,通过螺母固定在三角形连杆下端,通过张紧轮调整同步带的预紧力。
11、本发明的有益效果是:
12、1、所设计的三自由度前臂康复外骨骼机器人有三个自由度,其中第一关节能够带动人体肩部实现屈曲伸展运动,第二关节能够带动人体肘部实现屈曲伸展运动,第三关节通过平行四边形机构和带传动实现腕部的内旋外旋运动。在自由度配置方面,三个关节对应肩关节、肘关节、腕关节,能够满足患者整个前臂运动的基本要求,保证各个部位的康复训练效果。
13、2、所设计的三自由度前臂康复外骨骼机器人第一关节与第二关节的转动采用行星齿轮减速和绞盘减速器减速的两级减速方式,可以提供更大的转矩,通过这种设计使第一关机与第二关节的驱动电机选型更小,节省了制造成本。通过这种两级减速器的设计,可以发挥齿轮减速与绞盘减速各自的优势,获得更好的适用性和可靠性,同时在工作时减少了外骨骼机构的震动和噪音,提高系统的工作效率。
14、3、所设计的平行四边形机构的远心点与人体前臂旋前旋后的转动中心重合,使得手柄瞬时转动中心保持一致,实现了腕部的旋前旋后运动,同时解决了患者腕部与三自由度前臂康复外骨骼机器人第三关节运动不协同的问题,保证了腕部运动康复训练效果,提高了患者佩戴的舒适性。
15、4、所设计的长度调节装置通过光轴在直线轴承上的不同定位,调节前臂康复外骨骼机构的整体长度,使其可以适用于不同臂长的人群,提高了前臂康复外骨骼机器人的普适性。
16、5、所涉及的三自由度前臂康复外骨骼机器人可以控制三种不同的训练模式。当患者处于偏袒康复前期无法进行自主运动的场景时,三自由度前臂康复外骨骼机器人能够带动牵引患者的肢体完成预定轨迹的动作,帮助患者及早进行高强度的肢体引导性任务;当患者处于偏袒康复中后期时,三自由度前臂康复外骨骼机器人能够随着患者的手臂运动跟随运动;当患者处于偏袒康复后期时,需要进行一定强度的肩部肌肉训练,这时三自由度前臂康复外骨骼机器人能够处于阻抗模式,协同患者锻炼肩部力量;除此之外,在示教训练模式下,三自由度前臂康复外骨骼机器人还应能复现示教者的运动轨迹。这样能够帮助患者及时尽早建立联系,功能性方面满足患者要求。
本文地址:https://www.jishuxx.com/zhuanli/20240615/84883.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表