驱动装置的制作方法
- 国知局
- 2024-07-11 17:38:58
本公开涉及医疗器械,具体而言,涉及一种驱动装置。
背景技术:
1、在血管介入手术机器人治疗的过程中,介入手术机器人连接于介入耗材,以通过控制介入耗材实现对患者的精准治疗。但是,由于介入手术机器人整体体积较大,只能实现对介入耗材的粗略位置调节,为了实现对介入耗材的精准调节,需要在介入手术机器人上设置驱动装置,连接介入耗材,实现对患者的精准治疗。
2、相关的驱动方式中,驱动装置通常采用皮带进行驱动,将介入耗材连接于驱动装置上。具体的,驱动装置包括驱动本体和皮带,皮带连接于介入手术机器人,驱动本体设置于皮带上,连接于外部的介入耗材,以通过皮带的驱动,驱动驱动本体运动,从而带动介入耗材对患者精准治疗。
3、但是,由于皮带的张力会受到张紧力、回弹力等多种因素的影响,会影响驱动本体运动的准确性。
技术实现思路
1、本公开的目的在于克服上述相关技术的至少一种不足,提供一种驱动装置,可以精准控制驱动本体的运动。
2、本公开的额外方面和优点将部分地在下面的描述中阐述,并且部分地将从描述中变得显然,或者可以通过本公开的实践而习得。
3、根据本公开的一个方面,提供一种驱动装置,应用于介入手术机器人,介入手术机器人包括机器人本体和耗材盒,机器人本体包括壳体,壳体设有槽口,驱动装置包括:
4、支撑组件,设置于壳体内;
5、驱动本体,可滑动的设置于支撑组件上,驱动本体用于连接耗材盒,带动耗材盒沿槽口的延伸方向移动;
6、动力组件,用于驱动驱动本体相对支撑组件移动;
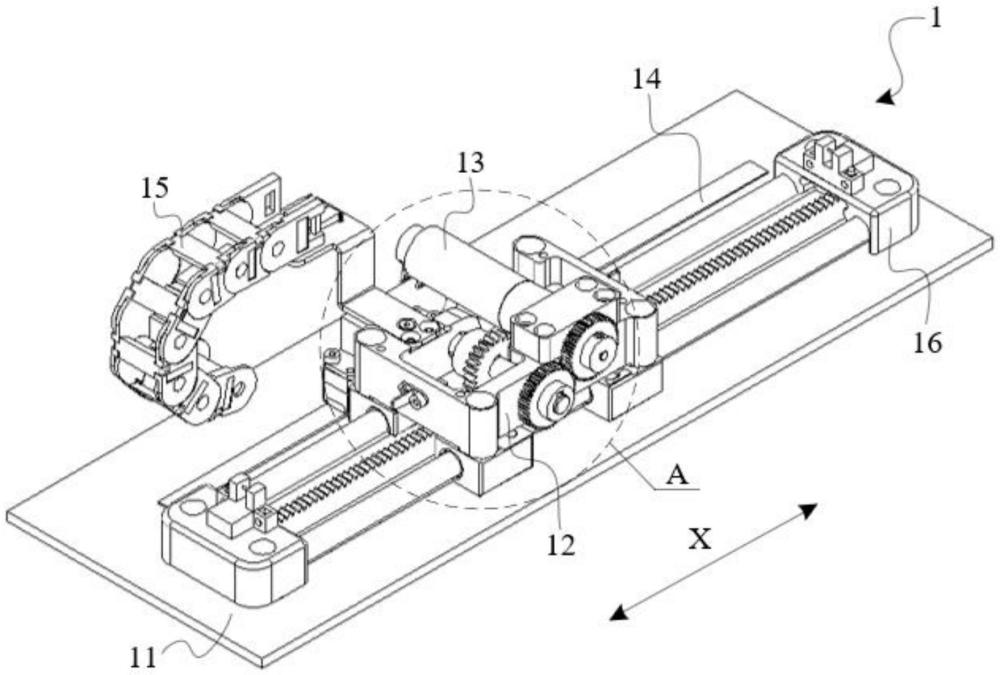
7、动力组件包括齿条和齿轮,齿条设置于支撑组件上靠近驱动本体的一侧,齿条的延伸方向与槽口的延伸方向平行,齿轮设置于驱动本体上,与齿条啮合连接,用于带动驱动本体沿齿条的延伸方向移动;
8、传感器,设置于支撑组件上,电连接于驱动本体,用于配合齿轮和齿条的啮合运动,感测驱动本体相对齿条的位置信息。
9、在本公开的一种示例性实施方式中,齿轮包括:
10、主动齿轮,设置于驱动本体上;
11、从动齿轮,连接于主动齿轮和齿条;
12、动力组件还包括电机,电机的驱动轴连接于主动齿轮。
13、在本公开的一种示例性实施方式中,从动齿轮包括:
14、第一从动齿轮,啮合连接于主动齿轮;
15、第二从动齿轮,同轴连接于第一从动齿轮,啮合连接于齿条,以通过第一从动齿轮和第二从动齿轮的连接改变主动齿轮相对齿条的位置。
16、在本公开的一种示例性实施方式中,传感器为光栅尺,包括:
17、光栅尺本体,设置于支撑组件上朝向驱动本体的一侧,与齿条的延伸方向相同;
18、光栅读数头,可移动地设置于光栅尺本体上。
19、在本公开的一种示例性实施方式中,驱动装置还包括:
20、存储件,设置于支撑组件的一侧,用于容纳驱动本体的连接线和传感器的连接线。
21、在本公开的一种示例性实施方式中,存储件包括伸缩壳体,伸缩壳体的一端连接于支撑组件上,另一端连接于驱动本体上,用于驱动本体相对齿条移动时,伸缩壳体在伸展和收缩状态之间切换,且驱动本体的连接线和传感器的连接线收纳于伸缩壳体内。
22、在本公开的一种示例性实施方式中,驱动装置还包括:
23、限位组件,包括多个限位开关和多个限位件,多个限位开关分别设置于齿条的两侧,多个限位件分别设置于驱动本体在沿齿条运动方向的两侧,用于和限位开关在连接和分离状态之间切换。
24、在本公开的一种示例性实施方式中,限位组件还包括:
25、多个固定件,设置于支撑组件上,分别连接于齿条的两端,限位开关设置于固定件上背离支撑组件的一侧。
26、在本公开的一种示例性实施方式中,支撑组件包括:
27、支撑架,设置于壳体内;
28、导轨,设置于支撑架朝向驱动本体的一侧,与齿条的延伸方向相同,驱动本体可移动地设置于导轨上。
29、在本公开的一种示例性实施方式中,齿条延伸方向上的长度大于或者等于槽口延伸方向上的长度。
30、本公开的驱动装置,应用于介入手术机器人,介入手术机器人包括机器人本体和耗材盒,机器人本体包括壳体,壳体设有槽口。驱动装置包括支撑组件、驱动本体、动力组件和传感器,支撑组件设置于壳体内,驱动本体、动力组件和传感器均设置于支撑组件上,动力组件连接于支撑组件和驱动本体,包括齿轮和齿条,齿轮和齿条的啮合运动驱动驱动本体相对支撑组件运动,配合传感器对驱动本体相对齿条的位置信息进行感测,可以精准控制驱动本体的运动。
31、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
技术特征:1.一种驱动装置,应用于介入手术机器人,所述介入手术机器人包括机器人本体和耗材盒,所述机器人本体包括壳体,所述壳体设有槽口,其特征在于,所述驱动装置包括:
2.根据权利要求1所述的驱动装置,其特征在于,所述齿轮包括:
3.根据权利要求2所述的驱动装置,其特征在于,所述从动齿轮包括:
4.根据权利要求1所述的驱动装置,其特征在于,所述传感器为光栅尺,包括:
5.根据权利要求1或4所述的驱动装置,其特征在于,所述驱动装置还包括:
6.根据权利要求5所述的驱动装置,其特征在于,所述存储件包括伸缩壳体,所述伸缩壳体的一端连接于所述支撑组件上,另一端连接于所述驱动本体上,用于所述驱动本体相对所述齿条移动时,所述伸缩壳体在伸展和收缩状态之间切换,且所述驱动本体的连接线和所述传感器的连接线收纳于所述伸缩壳体内。
7.根据权利要求1至4中任一项所述的驱动装置,其特征在于,所述驱动装置还包括:
8.根据权利要求7所述的驱动装置,其特征在于,所述限位组件还包括:
9.根据权利要求1至4中任一项所述的驱动装置,其特征在于,所述支撑组件包括:
10.根据权利要求1至4中任一项所述的驱动装置,其特征在于,所述齿条延伸方向上的长度大于或者等于所述槽口延伸方向上的长度。
技术总结本公开提出一种驱动装置,涉及医疗器械技术领域。该驱动装置应用于介入手术机器人,介入手术机器人包括机器人本体和耗材盒,机器人本体包括壳体,壳体设有槽口,驱动装置包括支撑组件、驱动本体、动力组件和传感器。支撑组件设置于壳体内;驱动本体可滑动的设置于支撑组件上,驱动本体用于连接耗材盒,带动耗材盒沿槽口的延伸方向移动;动力组件用于驱动驱动本体相对支撑组件移动,动力组件包括齿条和齿轮,齿轮与齿条啮合连接,用于带动驱动本体沿齿条的延伸方向移动;传感器设置于支撑组件上,电连接于驱动本体,用于配合齿轮和齿条的啮合运动,感测驱动本体相对齿条的位置信息。本公开的驱动装置,可以精准控制驱动本体的运动。技术研发人员:请求不公布姓名受保护的技术使用者:北京万思医疗器械有限公司技术研发日:20230919技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240615/85278.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。