移动装置及复合机器人的制作方法
- 国知局
- 2024-07-05 17:42:45
本申请涉及机器人,具体而言,涉及一种移动装置及复合机器人。
背景技术:
1、低压开关柜是低压配电室的主要设备之一,日常运维主要包括开关柜工作状态巡检、断路器分合闸操作、开关柜抽屉的摇进摇出操作。
2、低压电控室开关柜的高度较高,每个柜体上集成了不同层数的抽屉,人工运维检修的工作量较大。目前通常的操作方式均为人工手动操作,由于开关柜抽屉的摇进、摇出操作和断路器分合闸操作流程复杂,导致人工操作时稍有失误就会引起严重事故,轻则财产损失,重则人员伤亡。同时配电室开关柜及其配置的抽屉数量较大,机器人升降机构的行程较大,运维及操作的工作量较大。
技术实现思路
1、本申请实施例的目的在于提供一种移动装置及复合机器人,可大幅度缩短移动行程,减小整体的结构尺寸,消除视觉及操作盲区。
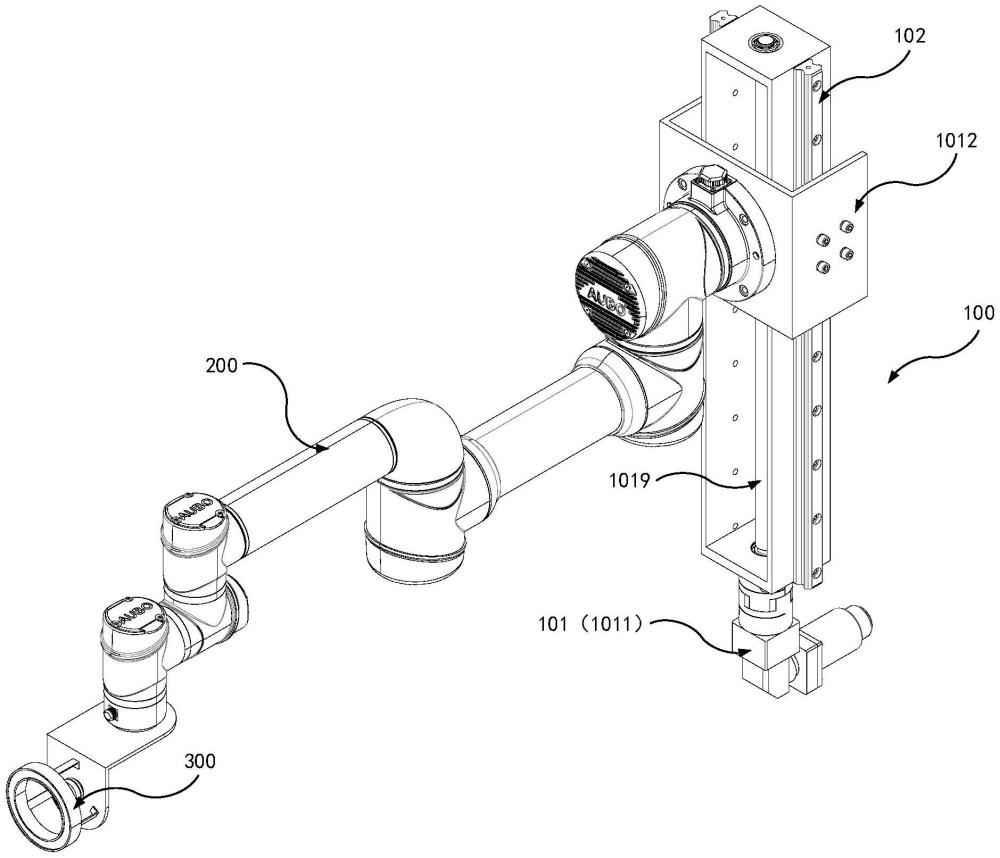
2、第一方面,本申请实施例提供了一种移动装置,包括:移动组件,其包括驱动机构及连接机构,所述驱动机构配置于所述连接机构,且所述驱动机构配置为沿第一方向分布;协作臂,其配置为分别与所述连接机构及所述驱动机构连接,以通过所述驱动机构沿着所述第一方向移动,且所述协作臂配置有若干方向的自由度;视觉组件,其配置于所述协作臂。
3、在上述实现的过程中,驱动机构与连接机构连接,协作臂分别与驱动机构及连接机构连接,视觉组件与协作臂连接,使得复合机器人在巡检作业时,通过视觉组件的算法分析,高效地位协作臂以及驱动机构提供精确引导,消除视觉及操作盲区,同时协作臂具有若干方向的自由度,可大幅度缩短驱动机构驱动协作臂沿着第一方向移动的行程,减小整体的结构尺寸,通过移动组件及协作臂的多维度调节,满足移动装置在不同位置的精确操作及巡视巡检。
4、在一些实施例中,驱动机构包括驱动件、驱动结构及移动支架,所述驱动件与所述驱动结构连接,所述驱动结构与所述连接机构连接,且沿所述第一方向分布,所述移动支架套设于所述驱动结构,且所述移动支架的一侧配置有所述协作臂。
5、在上述实现的过程中,驱动件与连接机构连接,驱动结构分别与驱动件及连接机构连接,驱动结构上套设有移动支架,使得驱动件进行工作时,能够实现驱动结构的转动,进而实现移动支架沿着第一方向移动,满足在不同位置的精确操作及巡视巡检。
6、在一些实施例中,所述移动支架包括支架本体、滑块及连接座,所述滑块及所述连接座均配置于所述支架本体的内侧,所述滑块配置为与所述连接机构连接,所述连接座配置为与所述驱动结构连接。
7、在上述实现的过程中,滑块及连接座均位于支架本体的内侧,且滑块用于与连接机构适配,连接座用于与驱动结构适配,使得驱动机构在进行驱动时,能够实现协作臂沿着第一方向进行移动,稳定性好,同时结合协作臂自身的多方向的自由度,能够减小整体的结构尺寸,满足移动装置在不同位置的精确操作及巡视巡检。
8、在一些实施例中,所述支架本体的内侧配置有固定座,所述固定座沿所述第一方向配置有固定槽,所述固定槽被配置为用于容纳所述连接座的部分结构,且所述固定座配置为与所述连接座连接。通过固定座的固定槽与连接座进行适配,方便支架本体与驱动结构连接,进而实现协作臂沿着第一方向的移动,提高稳定性,满足不同位置的精确操作。
9、在一些实施例中,所述驱动结构包括减速件、轴承件及滚珠丝杆,所述减速件配置为与所述驱动件连接,所述轴承件配置为与所述减速件连接,所述滚珠丝杆配置为与所述轴承件连接,且所述滚珠丝杆套设有所述移动支架。
10、在一些实施例中,所述连接机构包括连接件及滑轨,所述连接件沿所述第一方向配置有容纳槽,所述容纳槽的开口方向配置为朝向所述协作臂,所述滑轨配置于所述连接件,且所述滑轨与所述驱动机构适配。
11、在一些实施例中,所述视觉组件包括安装件及视觉件,所述安装件配置为与所述协作臂连接,所述视觉件配置为与所述安装件连接。通过将视觉件与安装件连接,安装件与协作臂连接,能够基于视觉件的算法分析,高效地为协作臂及驱动机构提供精确引导。
12、在一些实施例中,所述视觉组件还包括光源件,所述光源件配置为与所述安装件连接,且所述光源件与所述视觉件位于所述安装件的同侧。通过在安装件上配置光源件,使得复合机器人在巡检作业时,可作为视觉件的有益补充,消除视觉件拍摄最底层时角度不合适造成的图像扭曲现象,消除机器人视觉及操作盲区,提高状态识别的准确率。
13、在一些实施例中,所述协作臂配置有若干关节,以用于至少五个方向的调节。能够实现多维度调节,满足复合机器人对不同位置的精确操作及巡视巡检。
14、第二方面,本申请还提供一种复合机器人,包括如上述任一项所述的移动装置。
15、本申请第二方面实施例提供的复合机器人,因包括第一方面技术方案中所述的移动装置,因而具有上述实施例所具有的一切技术效果,在此不再赘述。
16、本公开的其他特征和优点将在随后的说明书中阐述,或者,部分特征和优点可以从说明书推知或毫无疑义地确定,或者通过实施本公开的上述技术即可得知。
17、为使本申请的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:1.一种移动装置,其特征在于,包括:
2.根据权利要求1所述的移动装置,其特征在于,驱动机构包括驱动件、驱动结构及移动支架,所述驱动件与所述驱动结构连接,所述驱动结构与所述连接机构连接,且沿所述第一方向分布,所述移动支架套设于所述驱动结构,且所述移动支架的一侧配置有所述协作臂。
3.根据权利要求2所述的移动装置,其特征在于,所述移动支架包括支架本体、滑块及连接座,所述滑块及所述连接座均配置于所述支架本体的内侧,所述滑块配置为与所述连接机构连接,所述连接座配置为与所述驱动结构连接。
4.根据权利要求3所述的移动装置,其特征在于,所述支架本体的内侧配置有固定座,所述固定座沿所述第一方向配置有固定槽,所述固定槽被配置为用于容纳所述连接座的部分结构,且所述固定座配置为与所述连接座连接。
5.根据权利要求2所述的移动装置,其特征在于,所述驱动结构包括减速件、轴承件及滚珠丝杆,所述减速件配置为与所述驱动件连接,所述轴承件配置为与所述减速件连接,所述滚珠丝杆配置为与所述轴承件连接,且所述滚珠丝杆套设有所述移动支架。
6.根据权利要求1所述的移动装置,其特征在于,所述连接机构包括连接件及滑轨,所述连接件沿所述第一方向配置有容纳槽,所述容纳槽的开口方向配置为朝向所述协作臂,所述滑轨配置于所述连接件,且所述滑轨与所述驱动机构适配。
7.根据权利要求1所述的移动装置,其特征在于,所述视觉组件包括安装件及视觉件,所述安装件配置为与所述协作臂连接,所述视觉件配置为与所述安装件连接。
8.根据权利要求7所述的移动装置,其特征在于,所述视觉组件还包括光源件,所述光源件配置为与所述安装件连接,且所述光源件与所述视觉件位于所述安装件的同侧。
9.根据权利要求1所述的移动装置,其特征在于,所述协作臂配置有若干关节,以用于至少五个方向的调节。
10.一种复合机器人,其特征在于,包括如权利要求1-9任一项所述的移动装置。
技术总结本申请实施例提供一种移动装置及复合机器人,包括移动组件,包括驱动机构及连接机构,驱动机构配置于连接机构;协作臂分别与连接机构及驱动机构连接,以通过驱动机构移动,且协作臂配置有若干方向的自由度;视觉组件,配置于所述协作臂。驱动机构与连接机构连接,协作臂分别与驱动机构及连接机构连接,视觉组件与协作臂连接,使得复合机器人在巡检作业时,通过视觉组件的算法分析,高效地位协作臂以及驱动机构提供精确引导,消除视觉及操作盲区,同时协作臂具有若干方向的自由度,可大幅度缩短驱动机构驱动协作臂移动的行程,减小整体的结构尺寸,通过移动组件及协作臂的多维度调节,满足移动装置在不同位置的精确操作及巡视巡检。技术研发人员:宋文轩,宗世堂,高宇,张旭可,魏二强,楚锋,杨尚凯,周国宾,耿延兵受保护的技术使用者:平顶山中选自控系统有限公司技术研发日:20231107技术公布日:2024/5/29本文地址:https://www.jishuxx.com/zhuanli/20240617/48842.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表