一种分类剥茧机器人的制作方法
- 国知局
- 2024-07-08 10:42:58
本发明属于机械手,具体而言,涉及一种分类剥茧机器人。
背景技术:
1、原料茧存在茧型大小,茧层厚薄、色泽等差异。在加工前需要对原料茧进行筛除,除却需要筛除原料茧中不能削口的下脚茧(如双宫茧、薄皮茧、穿虫茧、黄班茧、重油茧、软绵茧、深色茧、烂茧等),以及蚕茧内没有蚕蛹的次茧外,还需要根据茧子的茧子形态、颜色等内部情况将蚕茧分类。
2、目前的蚕茧筛选器械主要对原料茧的外形进行筛选,缺乏对蚕茧内部茧子作筛选分类的技术手段。
技术实现思路
1、本发明提供一种分料剥茧机器人,其目的在于:对茧子形态、颜色进行筛选分类。
2、本发明的实施例通过以下技术方案实现:
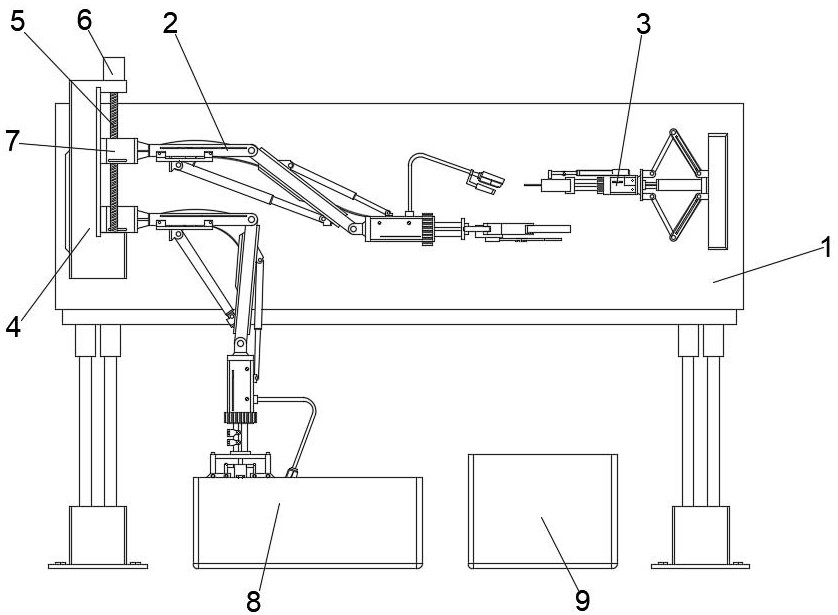
3、一种分类剥茧机器人,包括主控台、抓取模块、切割模块及识别模块;
4、所述抓取模块包括第一机械臂,所述第一机械臂的端部安装有夹持爪,所述机械臂远离夹持爪的一端连接在主控台上;
5、所述切割模块包括第二机械臂,所述第二机械臂上安装有切割器,所述切割器上安装有推板;
6、所述识别模块包括摄像头,所述摄像头电连接所述主控台;
7、所述主控台内设置有主控芯片,所述主控芯片与第一机械臂、第二机械臂及摄像头连接。
8、进一步的,所述第一机械臂包括第一电机,所述第一电机的输出端固定连接所述夹持爪,所述第一电机远离夹持爪的一端上铰接有第一曲臂,第一曲臂上铰接有第二曲臂,在第一曲臂上铰接有第一气缸,所述第一气缸的输出端铰接在所述第一电机上,所述第二曲臂上铰接有第二气缸,所述第二气缸的输出端铰接在所述第一曲臂上。
9、进一步的,所述第二曲臂远离第一曲臂的一端固定安装有滑块,所述滑块上螺纹连接有螺杆,所述螺杆的两端转动安装有移动槽内,所述移动槽固定安装在所述主控台上,所述螺杆的一端上固定连接有第二电机,所述第二电机固定安装在所述移动槽上。
10、进一步的,所述夹持爪上安装有压力传感器及支撑条,所述支撑条远离压力传感器一端延伸至所述夹持爪的夹持区域处。
11、进一步的,所述压力传感器包括压力检测器及压力比较器,所述支撑条安装在压力检测器及夹持爪之间,支撑条及压力检测器通过壳体进行固定。
12、进一步的,所述第二机械臂包括第三电机,所述第三电机的输出端与所述切割器固定连接,所述第三电机远离切割器的一端上固定连接有第三气缸,所述第三气缸安装在所述主控台上。
13、进一步的,所述推板通过电推杆安装在所述第三电机上。
14、进一步的,所述推板上固定连接有转杆,所述转杆与所述第一电推杆的输出端转动连接,在转杆与第一电推杆的转动连接处安装有扭簧。
15、进一步的,在摄像头上安装有吹风机。
16、进一步的,所述支撑条包括第一段及第二段,所述第一段与第二段铰接,所述第一段的一侧上固定安装有第二电推杆,所述第二电推杆的输出端位于所述第二段的下方,所述第一段的另一侧上安装有限位片。
17、本发明实施例的技术方案至少具有如下优点和有益效果:
18、1.在夹持爪上安装摄像头,摄像头连接主控芯片,利用主控芯片的图像识别模块信号对切割后的蚕茧进行判定,判断后对蚕茧分类处理。分不同类别投递至不同收集槽。
19、2.在夹持爪上安装有压力传感器及支撑条,压力传感器用于在切割前对蚕茧进行判定,将蚕茧夹取后翻转夹持爪,使支撑条位于蚕茧的下方,松开夹持爪进行压力检测,空茧的重量轻,压力检测器检测后压力后将信号传输至压力比较器作出判断蚕茧是否是空茧。
技术特征:1.一种分类剥茧机器人,其特征在于:包括主控台(1)、抓取模块(2)、切割模块(3)及识别模块;
2.根据权利要求1所述的一种分类剥茧机器人,其特征在于:所述第一机械臂包括第一电机(202),所述第一电机(202)的输出端固定连接所述夹持爪(201),所述第一电机(202)远离夹持爪(201)的一端上铰接有第一曲臂(203),第一曲臂(203)上铰接有第二曲臂(204),在第一曲臂(203)上铰接有第一气缸(205),所述第一气缸(205)的输出端铰接在所述第一电机(202)上,所述第二曲臂(204)上铰接有第二气缸(206),所述第二气缸(206)的输出端铰接在所述第一曲臂(203)上。
3.根据权利要求2所述的一种分类剥茧机器人,其特征在于:所述第二曲臂(204)远离第一曲臂(203)的一端固定安装有滑块(7),所述滑块(7)上螺纹连接有螺杆(5),所述螺杆(5)的两端转动安装有移动槽(4)内,所述移动槽(4)固定安装在所述主控台(1)上,所述螺杆(5)的一端上固定连接有第二电机(6),所述第二电机(6)固定安装在所述移动槽(4)上。
4.根据权利要求1所述的一种分类剥茧机器人,其特征在于:所述夹持爪(201)上安装有压力传感器(209)及支撑条(210),所述支撑条(210)远离压力传感器(209)一端延伸至所述夹持爪(201)的夹持区域处。
5.根据权利要求4所述的一种分类剥茧机器人,其特征在于:所述压力传感器(209)包括压力检测器及压力比较器,所述支撑条(210)安装在压力检测器及夹持爪(201)之间,支撑条(210)及压力检测器通过壳体进行固定。
6.根据权利要求1所述的一种分类剥茧机器人,其特征在于:所述第二机械臂包括第三电机(31),所述第三电机(31)的输出端与所述切割器(32)固定连接,所述第三电机(31)远离切割器(32)的一端上固定连接有第三气缸(33),所述第三气缸(33)安装在所述主控台(1)上。
7.根据权利要求6所述的一种分类剥茧机器人,其特征在于:所述推板(37)通过第一电推杆(35)安装在所述第三电机(31)上。
8.根据权利要求7所述的一种分类剥茧机器人,其特征在于:所述推板(37)上固定连接有转杆(36),所述转杆(36)与所述第一电推杆(35)的输出端转动连接,在转杆(36)与第一电推杆(35)的转动连接处安装有扭簧。
9.根据权利要求1所述的一种分类剥茧机器人,其特征在于:在摄像头(207)上安装有吹风机(208)。
10.根据权利要求4所述的一种分类剥茧机器人,其特征在于:所述支撑条(210)包括第一段及第二段,所述第一段与第二段铰接,所述第一段的一侧上固定安装有第二电推杆(211),所述第二电推杆(211)的输出端位于所述第二段的下方,所述第一段的另一侧上安装有限位片(212)。
技术总结本发明公开了一种分类剥茧机器人,属于机械手技术领域。包括主控台、抓取模块、切割模块及识别模块;抓取模块包括第一机械臂,第一机械臂的端部安装有夹持爪,机械臂远离夹持爪的一端连接在主控台上;切割模块包括第二机械臂,第二机械臂上安装有切割器,切割器上安装有推板;识别模块包括摄像头,摄像头电连接主控台;主控台内设置有主控芯片,主控芯片与第一机械臂、第二机械臂及摄像头连接。其目的在于:对茧子形态、颜色进行筛选分类。技术研发人员:王庆,陈瑜受保护的技术使用者:四川奥特丝纺织有限公司技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240617/49879.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表