一种搬运机器人用夹取装置的制作方法
- 国知局
- 2024-07-08 10:49:08
本技术涉及机器人领域,具体是一种搬运机器人用夹取装置。
背景技术:
1、搬运机器人为应用机器人运动轨迹实现代替人工搬运的自动化产品,搬运机器人利用机械手臂的末端连接夹取装置,即可对产品进行搬运,从而实现定速定量的完成搬运工作,且在搬运的时候机器人还可以计数产品的件数。
2、公开号为cn111203905a的中国发明专利在2020-05-29日公开了一种抓取夹具及抓取机器人。该抓取夹具包括底座和夹持装置,夹持装置包括均设置于底座且能够相互靠近或者远离的第一夹持件和第二夹持件,第一夹持件与第二夹持件的相对移动距离可调。该抓取机器人包括上述抓取夹具。本发明在于提供一种抓取夹具及抓取机器人,以缓解现有技术中存在的对砂芯抓取力度不稳定的技术问题。
3、但是上述已公开方案存在如下不足之处:现有的夹取装置针对性强,无法适配不同尺寸的长方体箱体,且无法适应不同长宽的长方体箱体,因此在更改不同尺寸形状的待搬运的箱体后,需要更换对应的夹具,因此影响搬运夹取的效率。
技术实现思路
1、本实用新型目的是解决现有的夹取装置针对性强,无法适配不同尺寸的长方体箱体,且无法适应不同长宽的长方体箱体,因此在更改不同尺寸形状的待搬运的箱体后,需要更换对应的夹具,因此影响搬运夹取的效率的技术问题,提供一种搬运机器人用夹取装置。
2、为了实现上述目的,本实用新型采用以下技术方案予以实现;
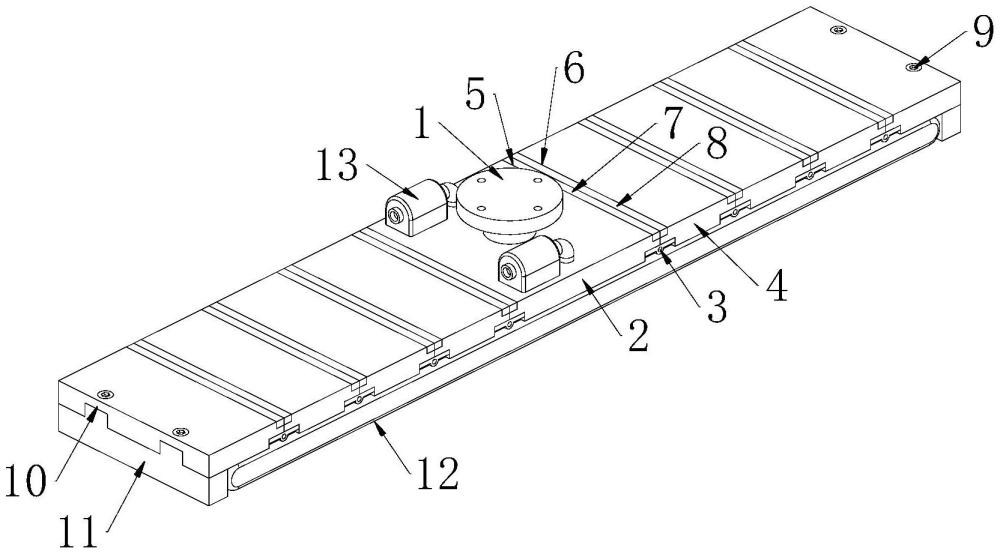
3、本实用新型所述的一种搬运机器人用夹取装置,包括法兰盘、中心板和弯折单元;所述法兰盘的下端固接有中心板;所述中心板上对称设有多个弯折单元;所述弯折单元包括合页和夹持板;所述合页对称固接在中心板的下表面两侧;所述合页上固接有夹持板;所述夹持板和中心板下表面固接有摩擦气囊;所述摩擦气囊上连通固接有多个气泵;所述气泵固接在中心板上表面。
4、进一步的,所述夹持板上开设有第二隐藏槽;所述中心板上对应第二隐藏槽开设有第一隐藏槽;所述第一隐藏槽内固接有第一磁条;所述第二隐藏槽内对应第一磁条固接有第二磁条;所述第二磁条和第一磁条的接触面磁力为互斥。
5、进一步的,所述夹持板的开设有限位槽;所述限位槽内插接有挡板。
6、进一步的,所述挡板上开孔螺纹插接有紧固件;所述夹持板的上表面对应紧固件开设有沉头孔。
7、进一步的,所述摩擦气囊通过尼农编织制成;所述气泵的数量为两个,且运输气体的方向相反;所述法兰盘与搬运机器人固接。
8、本实用新型提供的一种搬运机器人用夹取装置,具有以下有益效果:
9、1.本实用新型通过法兰盘连接在搬运机器人的末端机械手上,然后电动信号控制两个气泵的工作,使用时,一个气泵先将摩擦气囊内充气,使得多个夹持板保持水平,然后到达待搬运物体的上表面并接触,另一个气泵将摩擦气囊内抽气,摩擦气囊形变带动多个夹持板贴合箱体或者物体的两侧,从而完成夹持,然后搬运机器人动作移动到放置位置的上端,一个气泵再次对摩擦气囊充气,展开夹持板释放箱体或者物体,从而实现适配不同尺寸外形的箱体或者物体,解决了现有的夹取装置无法适配不同外形尺寸的箱体或者物体的问题;
10、2.本实用新型通过第二磁条和第一磁条的接触面磁力为互斥,使得在摩擦气囊没有充气的时候,多个夹持板处于向下向内倾斜的位置,从而使得贴合在箱体的两侧面,然后在摩擦气囊抽气接近真空的时候,紧紧的夹持在箱体的两个侧面,利用摩擦气囊与箱体之间的摩擦力进行固定,并在多个夹持板的相互铰接变形下,卡住不规则物体的表面凹凸位置,从而使得夹持的摩擦力更大,解决了现有的夹取装置的摩擦力面无法变化适配产品外形的问题。
技术特征:1.一种搬运机器人用夹取装置,其特征在于;包括法兰盘(1)、中心板(2)和弯折单元;所述法兰盘(1)的下端固接有中心板(2);所述中心板(2)上对称设有多个弯折单元;所述弯折单元包括合页(3)和夹持板(4);所述合页(3)对称固接在中心板(2)的下表面两侧;所述合页(3)上固接有夹持板(4);所述夹持板(4)和中心板(2)下表面固接有摩擦气囊(12);所述摩擦气囊(12)上连通固接有多个气泵(13);所述气泵(13)固接在中心板(2)上表面。
2.根据权利要求1所述的搬运机器人用夹取装置,其特征在于:所述夹持板(4)上开设有第二隐藏槽(6);所述中心板(2)上对应第二隐藏槽(6)开设有第一隐藏槽(5);所述第一隐藏槽(5)内固接有第一磁条(7);所述第二隐藏槽(6)内对应第一磁条(7)固接有第二磁条(8);所述第二磁条(8)和第一磁条(7)的接触面磁力为互斥。
3.根据权利要求2所述的搬运机器人用夹取装置,其特征在于:所述夹持板(4)的开设有限位槽(10);所述限位槽(10)内插接有挡板(11)。
4.根据权利要求3所述的搬运机器人用夹取装置,其特征在于:所述挡板(11)上开孔螺纹插接有紧固件(9);所述夹持板(4)的上表面对应紧固件(9)开设有沉头孔。
5.根据权利要求4所述的搬运机器人用夹取装置,其特征在于:所述摩擦气囊(12)通过尼农编织制成;所述气泵(13)的数量为两个,且运输气体的方向相反;所述法兰盘(1)与搬运机器人固接。
技术总结本技术涉及机器人领域,具体公开了一种搬运机器人用夹取装置,包括法兰盘、中心板和弯折单元;所述法兰盘的下端固接有中心板;通过法兰盘连接在搬运机器人的末端机械手上,然后电动信号控制两个气泵的工作,使用时,一个气泵先将摩擦气囊内充气,使得多个夹持板保持水平,然后到达待搬运物体的上表面并接触,另一个气泵将摩擦气囊内抽气,摩擦气囊形变带动多个夹持板贴合箱体或者物体的两侧,从而完成夹持,然后搬运机器人动作移动到放置位置的上端,一个气泵再次对摩擦气囊充气,展开夹持板释放箱体或者物体,从而实现适配不同尺寸外形的箱体或者物体,解决了现有的夹取装置无法适配不同外形尺寸的箱体或者物体的问题。技术研发人员:杨飞受保护的技术使用者:安徽思卡瑞自动化工程有限公司技术研发日:20230926技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240617/50375.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表