一种用于动作捕捉系统的微型集群机器人定位识别装置
- 国知局
- 2024-07-08 11:02:58
本发明涉及机器人,特别涉及一种用于动作捕捉系统的微型集群机器人定位识别装置。
背景技术:
1、集群机器人因具备分布式协作、高效任务完成和容错性强等能力。近年来逐渐成为国际研究热点问题。在集群机器人实验与集群算法验证过程中,获取集群机器人个体准确位置与方向信息是开展集群机器人实验的前提。
2、目前实现集群机器人定位的方法有:基于卫星定位系统、惯性导航定位系统、激光雷达等定位设备的定位方法,实现这些定位方法,需要较多的硬件支持,无法在用于集群机器人实验与集群算法验证的桌面微型集群机器人中应用。
3、目前针对桌面微型集群机器人,实现机器人定位的方法有:通过导航机器人向上投影特定的光学信标,工作机器人能够通过观察光学信标实现自主定位的方法(cn116718187a);在机器人顶部搭载aruco定位二维码,采用工业相机获取实验场地的图像信息后,基于图像信息识别机器人二维码并进行定位(cn114019963a);通过鱼眼摄像头采集集群机器人照片,并利用led灯圈进行机器人朝向检测和光成像通信(cn116079704a);基于声学感知处理系统实现邻居机器人相对定位(cn115972231a)。
4、上述方法中,导航机器人投影光学信标、通过鱼眼摄像头采集集群机器人照片以及基于声学感知处理系统的定位方法均是实现局部定位,不能实现桌面微型集群机器人在统一坐标系中全局位置的感知;而对于在机器人顶部搭载aruco定位二维码,采用工业相机识别机器人二维码并进行定位的方法,由于单个aruco编码的数据量较少,而且工业相机识别aruco定位二维码的数据不稳定,在大规模的微型集群机器人实验中,识别结果容易出错。
5、动作捕捉系统通过高精度的实时数据采集,可实现了对运动的准确捕捉和分析,具有非侵入性、实时性强的优势。利用动作捕捉系统进行集群机器人实验,使得研究者能够更准确地观察和分析机器人的运动行为,从而提高集群机器人的智能性和适应性。
6、公开号为cn112653987a以及公开号为cn110567460a的中国专利申请均公开了采用反射式动作捕捉系统,利用动捕镜头来识别反光标识点(marker点)实现集群机器人室内定位。当进行大规模的微型集群机器人实验时,尤其是群体规模超过100个的微型集群机器人实验时,这就需要设计100种不同的反光标识点布局来保证动作捕捉系统对每种布局的准确识别。但微型集群机器人表面空间有限,在布局反光标识点时很容易出现重复度高所导致错误识别的问题。如何在有限的空间里让动作捕捉系统识别更多的机器人个体,以及机器人个体的反光标识点如何优化布局,来提高动作捕捉系统识别精度是亟待解决的问题。
技术实现思路
1、针对在进行大规模微型集群机器人实验时,由于微型集群机器人表面空间有限,marker点布局困难、重复度高,进而导致动作捕捉系统识别错误的问题,本发明提出一种用于动作捕捉系统的微型集群机器人定位识别装置。
2、本发明的技术方案为:
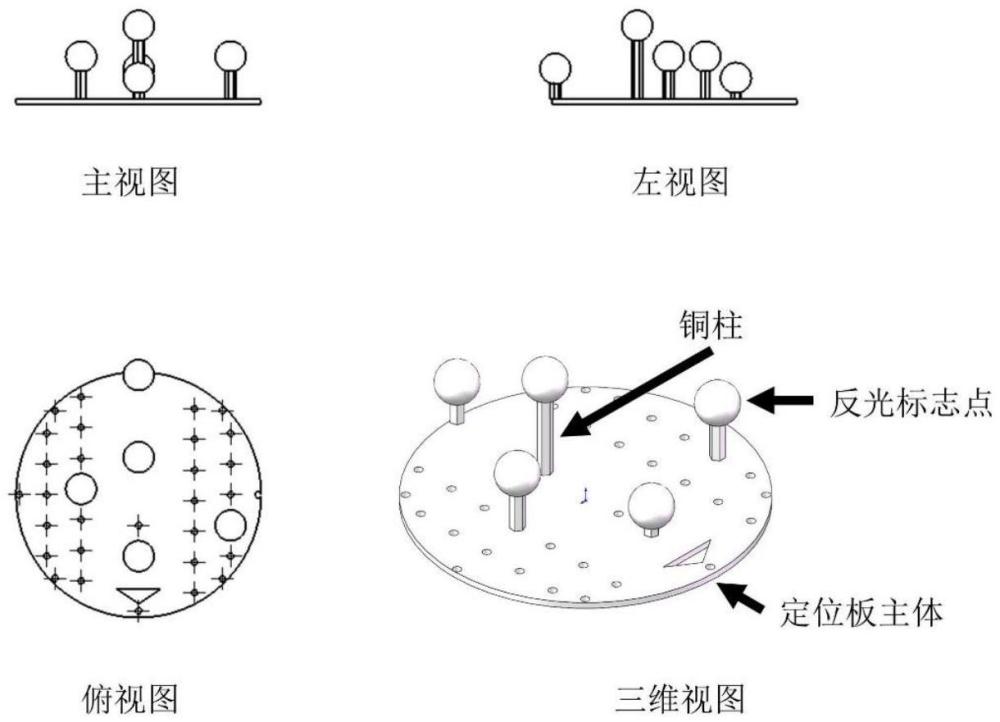
3、所述一种用于动作捕捉系统的微型集群机器人定位识别装置,包括定位板主体、立柱以及反光标志点;
4、所述定位板主体表面按照设定规则划分为多类点位区域,并按照设定规则在每类点位区域中布置若干点位;
5、所述立柱或立柱组合的顶部安装有所述反光标志点,并能够按照设定规则将立柱或立柱组合安装在所述点位中;且所述立柱具有不同长度;
6、根据立柱或立柱组合安装的点位以及立柱长度,能够确定机器人定位识别编码。
7、进一步的优选方案,所述反光标识点为表面涂有反光材料的球体,能够反射动作捕捉系统红外摄像头发出的红外光。
8、进一步的优选方案,所述设定规则为:
9、所述定位板主体表面划分4类常驻点位区域,包括:
10、1号点位区域:具有1个点位,且点位中心位于机器人运动中心在定位板主体表面的投影位置;
11、2号点位区域:具有至少1个点位,且2号点位区域的点位中心处于1号点位中心与定位板主体中心的连线上,并靠近机器人头部;
12、3号点位区域以及4号点位区域:分别位于1号点位中心与定位板主体中心连线左右两侧;在3号点位区域内设有m行n列个交点,在每个交点附近设定范围内开有点位;在4号点位区域内设有m’行n’列个交点,在每个交点附近设定范围内开有点位;
13、4类点位区域均为常驻点位,每个机器人在每类点位区域中均布置有一个反光标志点。
14、进一步的优选方案,根据立柱或立柱组合安装的点位以及立柱长度,确定的机器人定位识别编码为:“1号点位高低2号点位高低2号点位位置3号点位高低3号点位位置4号点位高低4号点位位置”。
15、进一步的优选方案,在所述定位板主体表面还划分有备用点位区域,所述备用点位区域处于4类常驻点位区域之外;在机器人定位识别编码中,根据备用点位使用情况,增加编码“备用点位高低备用点位位置”。
16、进一步的优选方案,立柱的长度采用3种类型,立柱组合方式采用3种组合方式,点位高低编码通过4位2进制数来表示,其中2位2进制数表示立柱组合方式:00无意义、01表示1根立柱、10表示2根立柱同轴组合、11表示3根立柱同轴组合;另2位2进制数表示采用的立柱长度类型:00无意义、01表示使用第一种长度立柱、10表示使用第二种长度立柱、11表示使用第三种长度立柱。
17、进一步的优选方案,2号点位区域具有3个点位,从机器人头部向尾部,分别用2进制数01,10,11来进行点位位置编码。
18、进一步的优选方案,3号点位区域以及4号点位区域的点位位置采用点位对应的交点的坐标作为位置编码。
19、进一步的优选方案,3号点位区域的点位位置与4号点位区域的点位位置相对于1号点位中心与定位板主体中心的连线不对称。
20、进一步的优选方案,所述定位板主体表面开有腰和底不等长的等腰三角形孔,且所述定位板主体安装在机器人上后,等腰三角形顶角指向机器人头部。
21、有益效果
22、本发明针对微型集群机器人表面空间有限,常规方式布局marker点困难,易重复度高而导致动作捕捉系统识别错误的问题,通过设置4类常驻点位区域以及设置立柱高低的方式来实现反光标志点位置编码,进而作为机器人的个体编码。这种反光标志点布置方式在大规模桌面集群机器人试验时,不易被遮挡,且编码容量巨大,能够满足大规模桌面集群机器人试验的机器人定位需求。
23、相较于随机布置与人工布置,基于编码规则的反光标志点布局方式可以降低布局的重复性与后续的维修维护成本,提高了动作捕捉系统识别稳定性。
24、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:1.一种用于动作捕捉系统的微型集群机器人定位识别装置,包括定位板主体、立柱以及反光标志点;
2.根据权利要求1所述一种用于动作捕捉系统的微型集群机器人定位识别装置,其特征在于:所述反光标识点为表面涂有反光材料的球体,能够反射动作捕捉系统红外摄像头发出的红外光。
3.根据权利要求1所述一种用于动作捕捉系统的微型集群机器人定位识别装置,其特征在于:所述设定规则为:
4.根据权利要求3所述一种用于动作捕捉系统的微型集群机器人定位识别装置,其特征在于:根据立柱或立柱组合安装的点位以及立柱长度,确定的机器人定位识别编码为:“1号点位高低2号点位高低2号点位位置3号点位高低3号点位位置4号点位高低4号点位位置”。
5.根据权利要求3或4所述一种用于动作捕捉系统的微型集群机器人定位识别装置,其特征在于:在所述定位板主体表面还划分有备用点位区域,所述备用点位区域处于4类常驻点位区域之外;在机器人定位识别编码中,根据备用点位使用情况,增加编码“备用点位高低备用点位位置”。
6.根据权利要求4所述一种用于动作捕捉系统的微型集群机器人定位识别装置,其特征在于:立柱的长度采用3种类型,立柱组合方式采用3种组合方式,点位高低编码通过4位2进制数来表示,其中2位2进制数表示立柱组合方式:00无意义、01表示1根立柱、10表示2根立柱同轴组合、11表示3根立柱同轴组合;另2位2进制数表示采用的立柱长度类型:00无意义、01表示使用第一种长度立柱、10表示使用第二种长度立柱、11表示使用第三种长度立柱。
7.根据权利要求4所述一种用于动作捕捉系统的微型集群机器人定位识别装置,其特征在于:2号点位区域具有3个点位,从机器人头部向尾部,分别用2进制数01,10,11来进行点位位置编码。
8.根据权利要求4所述一种用于动作捕捉系统的微型集群机器人定位识别装置,其特征在于:3号点位区域以及4号点位区域的点位位置采用点位对应的交点的坐标作为位置编码。
9.根据权利要求3或4所述一种用于动作捕捉系统的微型集群机器人定位识别装置,其特征在于:3号点位区域的点位位置与4号点位区域的点位位置相对于1号点位中心与定位板主体中心的连线不对称。
10.根据权利要求1所述一种用于动作捕捉系统的微型集群机器人定位识别装置,其特征在于:所述定位板主体表面开有腰和底不等长的等腰三角形孔,且所述定位板主体安装在机器人上后,等腰三角形顶角指向机器人头部。
技术总结本发明提出一种用于动作捕捉系统的微型集群机器人定位识别装置,包括定位板主体、立柱以及反光标志点;定位板主体表面按照设定规则划分为多类点位区域,并按照设定规则在每类点位区域中布置若干点位;立柱或立柱组合的顶部安装有反光标志点,并能够按照设定规则将立柱或立柱组合安装在点位中;且立柱具有不同长度;根据立柱或立柱组合安装的点位以及立柱长度,能够确定机器人定位识别编码。本发明通过设置4类常驻点位区域以及设置立柱高低的方式来实现反光标志点位置编码,进而作为机器人的个体编码,在大规模桌面集群机器人试验时,这种反光标志点布置方式不易被遮挡,且编码容量巨大,能够满足大规模桌面集群机器人试验的机器人定位需求。技术研发人员:彭星光,向雅伦,雷小康,郑志成,潘光,宋保维受保护的技术使用者:西北工业大学技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240617/51708.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表