基于神经网络和多维特征融合的水声目标识别方法及系统
- 国知局
- 2024-06-21 11:43:17
本发明涉及水声目标识别,具体为一种基于神经网络和多维特征融合的水声目标识别方法及系统。
背景技术:
1、水声目标识别(underwater acoustic target recognition)技术是一种信息处理技术,它利用被动目标辐射噪声、主动目标回波信号和声纳接收的其他传感器信号来提取目标特征并进行识别或对目标类型进行分类。由于海洋声场环境的复杂性、水声信道时-空-频变特性和其他噪声的干扰,水声目标识别任务仍然是一个巨大的挑战,该问题的复杂性已得到国际公认。
2、被动声纳观测到的水声信号一般分为两类,一种是自然环境噪声,包括风声、雨声、海洋生物的声音等;另一种是人工噪声,包括水下船舶、钻井平台、潜艇的辐射噪声,以及接收设备产生的各种干扰噪声。人们根据每种声音的独特声纹特征来识别各类型的声音信号,水下舰船目标的辐射噪声种类多样且相互作用,其主要声源成分由机械噪声、螺旋桨噪声和水动力噪声等组成。
3、水声目标识别任务中常用的信号特征通常分为三类,分别是时间波形特征、时频特征和听觉感知特征,包括过零率、峰峰值、短时傅立叶变换(stft)谱图、离散小波变换、lofar谱图、demon谱图、希尔伯特-黄(hilbert-huang)变换、mel谱图、,梅尔频率倒谱系数(mfcc)等特征。
4、传统方法所采用的波形特征通常是时序波形的一阶/二阶统计特征,往往作为相关水下目标识别任务中辅助特征而不是主要特征。对于时频特征,短时傅立叶变换时频谱可以保留目标波形信号中最全面的时频信息,因此短时傅立叶变换时频谱被广泛应用于语音信号处理和水声信号处理的相关研究中。从本质上讲,lofar谱几乎与stft谱相同,均为时频谱特征。demon频谱在提取时首先对接收到的宽带信号进行解调,得到低频包络频谱图,然后通过变换提取目标信号的轴频、叶频等低频物理特征。小波变换通常与希尔伯特-黄变换相结合进行特征提取,但由于缺乏准确的先验知识,基于经验模式分解的方法难以将目标信号从无序海洋噪声中分离出来。
技术实现思路
1、本发明的目的就在于为了解决上述至少一个技术问题而提供一种基于神经网络和多维特征融合的水声目标识别方法及系统。
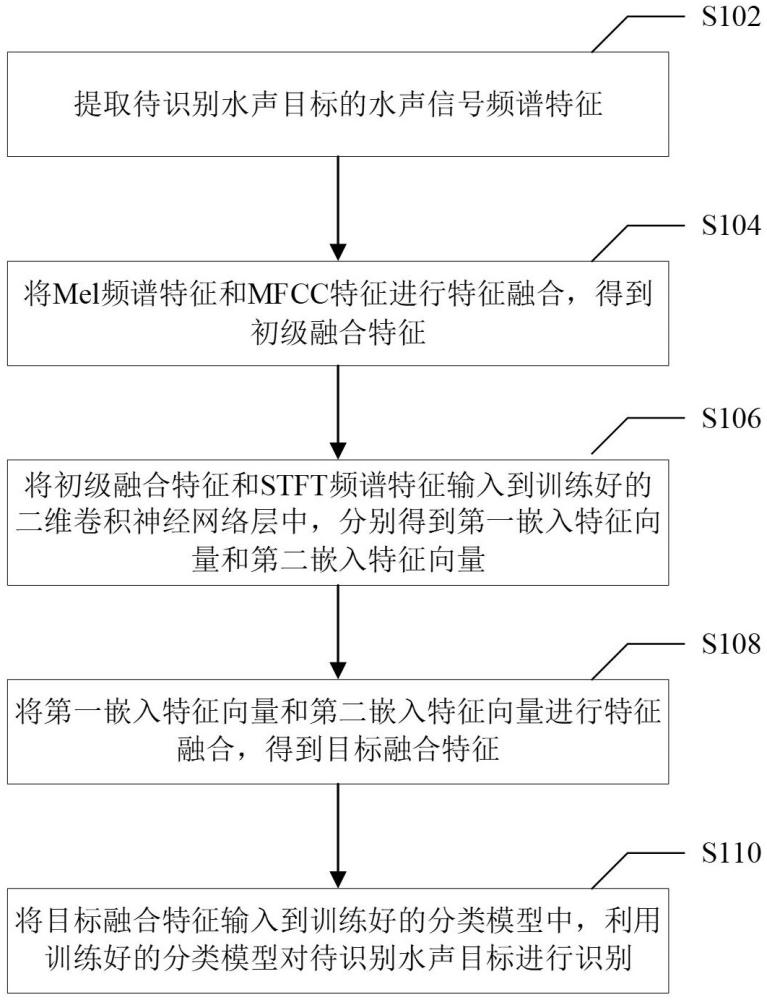
2、第一方面,本发明实施例提供了一种基于神经网络和多维特征融合的水声目标识别方法,包括:提取待识别水声目标的水声信号频谱特征;所述频谱特征包括:stft频谱特征、mel频谱特征和mfcc特征;将所述mel频谱特征和所述mfcc特征进行特征融合,得到初级融合特征;将所述初级融合特征和所述stft频谱特征输入到训练好的卷积神经网络中,分别得到第一嵌入特征向量和第二嵌入特征向量;将所述第一嵌入特征向量和所述第二嵌入特征向量进行特征融合,得到目标融合特征;将所述目标融合特征输入到训练好的分类模型中,利用所述训练好的分类模型对所述待识别水声目标进行识别。
3、进一步地,所述分类模型包括长短时记忆网络层。
4、进一步地,所述频谱特征还包括delta频谱和delta-delta频谱;提取待识别水声目标的水声信号频谱特征,包括:分别对所述水声信号进行预加重、分帧、加窗和离散傅里叶变换处理,得到所述stft频谱特征、所述mel频谱特征和所述mfcc特征;基于所述mel频谱特征,计算所述mel频谱特征对应的delta频谱和delta-delta频谱;基于所述stft频谱特征,计算所述stft频谱特征对应的delta频谱;其中,所述delta频谱计算算式包括:;所述delta-delta频谱计算算式包括:;式中,st+m为t+m时间帧的mel频谱特征或stft频谱特征,st-m为t-m时间帧的mel频谱特征或stft频谱特征,m表示所取的相邻帧的数量,m为时频谱的差分维数;为t+m时间帧的delta频谱特征系数,为t-m时间帧的delta频谱特征系数。
5、进一步地,将所述mel频谱特征和所述mfcc特征进行特征融合,得到初级融合特征,包括:将所述mel频谱特征、所述mel频谱特征对应的delta频谱和delta-delta频谱、所述mfcc特征进行特征融合,得到所述初级融合特征。
6、进一步地,将所述stft频谱特征输入到训练好的卷积神经网络中,包括:将所述stft频谱特征和所述stft频谱特征对应的delta频谱进行特征融合之后的特征作为输入,输入到所述训练好的卷积神经网络中。
7、进一步地,对所述分类模型进行优化的损失函数包括多类交叉熵损失函数。
8、第二方面,本发明实施例还提供了一种基于神经网络和多维特征融合的水声目标识别系统,包括:特征提取模块,嵌入向量生成模块,多维特征融合模块和水声目标识别模块;其中,所述特征提取模块,用于提取待识别水声目标的水声信号频谱特征;所述频谱特征包括:stft频谱特征、mel频谱特征和mfcc特征;所述特征提取模块,还用于将所述mel频谱特征和所述mfcc特征进行特征融合,得到初级融合特征;所述嵌入向量生成模块,用于将所述初级融合特征和所述stft频谱特征输入到训练好的卷积神经网络中,分别得到第一嵌入特征向量和第二嵌入特征向量;所述多维特征融合模块,用于将所述第一嵌入特征向量和所述第二嵌入特征向量进行特征融合,得到目标融合特征;所述水声目标识别模块,用于将所述目标融合特征输入到训练好的分类模型中,利用所述训练好的分类模型对所述待识别水声目标进行识别。
9、进一步地,所述频谱特征还包括delta频谱和delta-delta频谱;所述特征提取模块,还用于:分别对所述水声信号进行预加重、分帧、加窗和离散傅里叶变换处理,得到所述stft频谱特征、所述mel频谱特征和所述mfcc特征;基于所述mel频谱特征,计算所述mel频谱特征对应的delta频谱和delta-delta频谱;基于所述stft频谱特征,计算所述stft频谱特征对应的delta频谱;其中,所述delta频谱计算算式包括:;所述delta-delta频谱计算算式包括:;式中,st+m为t+m时间帧的mel频谱特征或stft频谱特征,st-m为t-m时间帧的mel频谱特征或stft频谱特征,m表示所取的相邻帧的数量,m为时频谱的差分维数;为t+m时间帧的delta频谱特征系数,为t-m时间帧的delta频谱特征系数。
10、第三方面,本发明实施例还提供了一种电子设备,包括:存储器、处理器和存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如第一方面所述的方法。
11、第四方面,本发明实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令被处理器执行时实现如第一方面所述的方法。
12、本发明提供了一种基于神经网络和多维特征融合的水声目标识别方法及系统,利用卷积神经网络层处理融合的多维时频域特征,然后利用分类模型对多维融合特征进行水声目标识别,可以有效地将目标信号从无序海洋噪声中分离出来,在提取具有显著表征能力的特征、实现稳健的目标分类模型方面具有明显优势。
本文地址:https://www.jishuxx.com/zhuanli/20240618/23124.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。